Perform QR Factorization Using CORDIC
The algorithm used in this example is the QR factorization implemented via CORDIC (Coordinate Rotation Digital Computer). This example shows how to write MATLAB® code that works for both floating-point and fixed-point data types.
A good way to write an algorithm intended for a fixed-point target is to write it in MATLAB using built-in floating-point types so you can verify that the algorithm works. When you refine the algorithm to work with fixed-point types, then the best thing to do is to write it so that the same code continues working with floating-point. That way, when you are debugging, then you can switch the inputs back and forth between floating-point and fixed-point types to determine if a difference in behavior is because of fixed-point effects such as overflow and quantization versus an algorithmic difference. Even if the algorithm is not well suited for a floating-point target (as is the case of using CORDIC in the following example), it is still advantageous to have your MATLAB code work with floating-point for debugging purposes.
In contrast, you may have a completely different strategy if your target is floating point. For example, the QR algorithm is often done in floating-point with Householder transformations and row or column pivoting. But in fixed-point it is often more efficient to use CORDIC to apply Givens rotations with no pivoting.
This example addresses the first case, where your target is fixed-point, and you want an algorithm that is independent of data type because it is easier to develop and debug.
In this example you will learn various coding methods that can be applied across systems. The significant design patterns used in this example are the following:
Data Type Independence: the algorithm is written in such a way that the MATLAB code is independent of data type, and will work equally well for
fi,double, andsingle.Overflow Prevention: method to guarantee not to overflow. This demonstrates how to prevent overflows in fixed-point.
Solving Systems of Equations: method to use computational efficiency. Narrow your code scope by isolating what you need to define.
The main part in this example is an implementation of the qr factorization in fixed-point arithmetic using CORDIC for the Givens rotations. The algorithm is written in such a way that the MATLAB code is independent of data type, and will work equally well for fixed-point, double-precision floating-point, and single-precision floating-point.
The QR factorization of M-by-N matrix A produces an M-by-N upper triangular matrix R and an M-by-M orthogonal matrix Q such that A = Q*R. A matrix is upper triangular if it has all zeros below the diagonal. An M-by-M matrix Q is orthogonal if Q'*Q = eye(M), the identity matrix.
The QR factorization is widely used in least-squares problems, such as the recursive least squares (RLS) algorithm used in adaptive filters.
The CORDIC algorithm is attractive for computing the QR algorithm in fixed-point because you can apply orthogonal Givens rotations with CORDIC using only shift and add operations.
Define the CORDIC QR Algorithm
The cordicqr function below implements the CORDIC QR algorithm, where A is an M-by-N real matrix and niter is the number of CORDIC iterations. Output Q is an M-by-M orthogonal matrix and R is an M-by-N upper-triangular matrix such that Q*R = A.
function [Q,R] = cordicqr(A,niter) Kn = inverse_cordic_growth_constant(niter); [m,n] = size(A); R = A; Q = coder.nullcopy(repmat(A(:,1),1,m)); % Declare type and size of Q Q(:) = eye(m); % Initialize Q for j=1:n for i=j+1:m [R(j,j:end),R(i,j:end),Q(:,j),Q(:,i)] = ... cordicgivens(R(j,j:end),R(i,j:end),Q(:,j),Q(:,i),niter,Kn); end end end
This function was written to be independent of data type. It works equally well with double and single floating-point types and with the fixed-point fi object.
One of the trickiest aspects of writing data-type independent code is to specify data type and size for a new variable. In order to preserve data types without having to explicitly specify them, the output R is set to be the same as input A:
R = A;
In addition to being data-type independent, this function was written in such a way that MATLAB Coder™ will be able to generate efficient C code from it. In MATLAB, you most often declare and initialize a variable in one step:
Q = eye(m)
However, Q = eye(m) would always produce Q as a double-precision floating point variable. If A is fixed-point, then Q should be fixed-point; if A is single, then Q should be single; etc.
Hence, you need to declare the type and size of Q in one step and then initialize it in a second step. This gives MATLAB Coder the information it needs to create an efficient C program with the correct types and sizes. In the finished code, you initialize output Q to be an M-by-M identity matrix and the same data type as A:
Q = coder.nullcopy(repmat(A(:,1),1,m)); % Declare type and size of Q
Q(:) = eye(m); % Initialize Q
The coder.nullcopy function declares the size and type of Q without initializing it. The expansion of the first column of A with repmat won't appear in code generated by MATLAB; it is only used to specify the size. The repmat function was used instead of A(:,1:m) because A may have more rows than columns, which will be the case in a least-squares problem. You have to be sure to always assign values to every element of an array when you declare it with coder.nullcopy, because if you don't then you will have uninitialized memory.
You will notice this pattern of assignment again and again. This is another key enabler of data-type independent code.
The heart of this function is applying orthogonal Givens rotations in-place to the rows of R to zero out sub-diagonal elements, thus forming an upper-triangular matrix. The same rotations are applied in-place to the columns of the identity matrix, thus forming orthogonal Q. The Givens rotations are applied using the cordicgivens function, as defined in the next section. The rows of R and columns of Q are used as both input and output to the cordicgivens function so that the computation is done in-place, overwriting R and Q.
[R(j,j:end),R(i,j:end),Q(:,j),Q(:,i)] = ...
cordicgivens(R(j,j:end),R(i,j:end),Q(:,j),Q(:,i),niter,Kn);
Define the CORDIC Givens Rotation
The cordicgivens function applies a Givens rotation by performing CORDIC iterations to rows x = R(j,j:end), y = R(i,j:end) around the angle defined by x(1) = R(j,j) and y(1) = R(i,j) where i > j, thus zeroing out R(i,j). The same rotation is applied to columns u = Q(:,j) and v = Q(:,i), thus forming the orthogonal matrix Q.
function [x,y,u,v] = cordicgivens(x,y,u,v,niter,Kn) if x(1)<0 % Compensation for 3rd and 4th quadrants x(:) = -x; u(:) = -u; y(:) = -y; v(:) = -v; end for i=0:niter-1 x0 = x; u0 = u; if y(1)<0 % Counter-clockwise rotation % x and y form R, u and v form Q x(:) = x - bitsra(y, i); u(:) = u - bitsra(v, i); y(:) = y + bitsra(x0,i); v(:) = v + bitsra(u0,i); else % Clockwise rotation % x and y form R, u and v form Q x(:) = x + bitsra(y, i); u(:) = u + bitsra(v, i); y(:) = y - bitsra(x0,i); v(:) = v - bitsra(u0,i); end end % Set y(1) to exactly zero so R will be upper triangular without round off % showing up in the lower triangle. y(1) = 0; % Normalize the CORDIC gain x(:) = Kn * x; u(:) = Kn * u; y(:) = Kn * y; v(:) = Kn * v; end
The advantage of using CORDIC in fixed-point over the standard Givens rotation is that CORDIC does not use square root or divide operations. Only bit-shifts, addition, and subtraction are needed in the main loop, and one scalar-vector multiply at the end to normalize the CORDIC gain. Also, CORDIC rotations work well in pipelined architectures.
The bit shifts in each iteration are performed with the bit shift right arithmetic (bitsra) function instead of bitshift, multiplication by 0.5, or division by 2, because bitsra
generates more efficient embedded code,
works equally well with positive and negative numbers,
works equally well with floating-point, fixed-point and integer types, and
keeps this code independent of data type.
It is worthwhile to note that there is a difference between sub-scripted assignment (subsasgn) into a variable a(:) = b versus overwriting a variable a = b. Sub-scripted assignment into a variable like this
x(:) = x + bitsra(y, i);
always preserves the type of the left-hand-side argument x. This is the recommended programming style in fixed-point. For example fixed-point types often grow their word length in a sum, which is governed by the SumMode property of the fimath object, so that the right-hand-side x + bitsra(y,i) can have a different data type than x.
If, instead, you overwrite the left-hand-side like this
x = x + bitsra(y, i);
then the left-hand-side x takes on the type of the right-hand-side sum. This programming style leads to changing the data type of x in fixed-point code, and is discouraged.
Define the Inverse CORDIC Growth Constant
The inverse_cordic_growth_constant function returns the inverse of the CORDIC growth factor after niter iterations. It is needed because CORDIC rotations grow the values by a factor of approximately 1.6468, depending on the number of iterations, so the gain is normalized in the last step of cordicgivens by a multiplication by the inverse Kn = 1/1.6468 = 0.60725.
function Kn = inverse_cordic_growth_constant(niter) Kn = 1/prod(sqrt(1+2.^(-2*(0:double(niter)-1)))); end
Explore CORDIC Growth as a Function of Number of Iterations
The function for CORDIC growth is defined as
growth = prod(sqrt(1+2.^(-2*(0:double(niter)-1))))
and the inverse is
inverse_growth = 1 ./ growth
Growth is a function of the number of iterations niter, and quickly converges to approximately 1.6468, and the inverse converges to approximately 0.60725. You can see in the following table that the difference from one iteration to the next ceases to change after 27 iterations. This is because the calculation hit the limit of precision in double floating-point at 27 iterations.
niter growth diff(growth) 1./growth diff(1./growth) 0 1.000000000000000 0 1.000000000000000 0 1 1.414213562373095 0.414213562373095 0.707106781186547 -0.292893218813453 2 1.581138830084190 0.166925267711095 0.632455532033676 -0.074651249152872 3 1.629800601300662 0.048661771216473 0.613571991077896 -0.018883540955780 4 1.642484065752237 0.012683464451575 0.608833912517752 -0.004738078560144 5 1.645688915757255 0.003204850005018 0.607648256256168 -0.001185656261584 6 1.646492278712479 0.000803362955224 0.607351770141296 -0.000296486114872 7 1.646693254273644 0.000200975561165 0.607277644093526 -0.000074126047770 8 1.646743506596901 0.000050252323257 0.607259112298893 -0.000018531794633 9 1.646756070204878 0.000012563607978 0.607254479332562 -0.000004632966330 10 1.646759211139822 0.000003140934944 0.607253321089875 -0.000001158242687 11 1.646759996375617 0.000000785235795 0.607253031529134 -0.000000289560741 12 1.646760192684695 0.000000196309077 0.607252959138945 -0.000000072390190 13 1.646760241761972 0.000000049077277 0.607252941041397 -0.000000018097548 14 1.646760254031292 0.000000012269320 0.607252936517010 -0.000000004524387 15 1.646760257098622 0.000000003067330 0.607252935385914 -0.000000001131097 16 1.646760257865455 0.000000000766833 0.607252935103139 -0.000000000282774 17 1.646760258057163 0.000000000191708 0.607252935032446 -0.000000000070694 18 1.646760258105090 0.000000000047927 0.607252935014772 -0.000000000017673 19 1.646760258117072 0.000000000011982 0.607252935010354 -0.000000000004418 20 1.646760258120067 0.000000000002995 0.607252935009249 -0.000000000001105 21 1.646760258120816 0.000000000000749 0.607252935008973 -0.000000000000276 22 1.646760258121003 0.000000000000187 0.607252935008904 -0.000000000000069 23 1.646760258121050 0.000000000000047 0.607252935008887 -0.000000000000017 24 1.646760258121062 0.000000000000012 0.607252935008883 -0.000000000000004 25 1.646760258121065 0.000000000000003 0.607252935008882 -0.000000000000001 26 1.646760258121065 0.000000000000001 0.607252935008881 -0.000000000000000 27 1.646760258121065 0 0.607252935008881 0 28 1.646760258121065 0 0.607252935008881 0 29 1.646760258121065 0 0.607252935008881 0 30 1.646760258121065 0 0.607252935008881 0 31 1.646760258121065 0 0.607252935008881 0 32 1.646760258121065 0 0.607252935008881 0
Compare CORDIC to the Standard Givens Rotation
The cordicgivens function is numerically equivalent to the following standard Givens rotation algorithm from Golub & Van Loan, Matrix Computations [3]. In the cordicqr function, if you replace the call to cordicgivens with a call to givensrotation, then you will have the standard Givens QR algorithm.
function [x,y,u,v] = givensrotation(x,y,u,v) a = x(1); b = y(1); if b==0 % No rotation necessary. c = 1; s = 0; return; else if abs(b) > abs(a) t = -a/b; s = 1/sqrt(1+t^2); c = s*t; else t = -b/a; c = 1/sqrt(1+t^2); s = c*t; end end x0 = x; u0 = u; % x and y form R, u and v form Q x(:) = c*x0 - s*y; u(:) = c*u0 - s*v; y(:) = s*x0 + c*y; v(:) = s*u0 + c*v; end
The givensrotation function uses division and square root, which are expensive in fixed-point, but good for floating-point algorithms.
Example of CORDIC Rotations
Here is a 3-by-3 example that follows the CORDIC rotations through each step of the algorithm. The algorithm uses orthogonal rotations to zero out the subdiagonal elements of R using the diagonal elements as pivots. The same rotations are applied to the identity matrix, thus producing orthogonal Q such that Q*R = A.
Let A be a random 3-by-3 matrix. Initialize R = A and Q = eye(3).
R = A = [-0.8201 0.3573 -0.0100
-0.7766 -0.0096 -0.7048
-0.7274 -0.6206 -0.8901]
Q = [ 1 0 0
0 1 0
0 0 1]
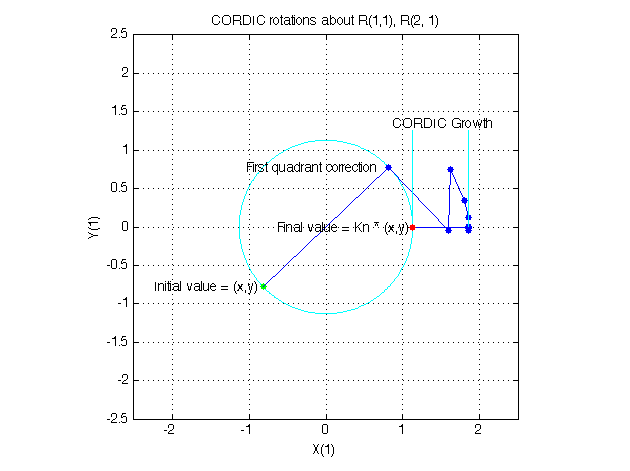
The first rotation is about the first and second row of R and the first and second column of Q. Element R(1,1) is the pivot and R(2,1) rotates to 0.
R before the first rotation R after the first rotation x [-0.8201 0.3573 -0.0100] -> x [1.1294 -0.2528 0.4918] y [-0.7766 -0.0096 -0.7048] -> y [ 0 0.2527 0.5049] -0.7274 -0.6206 -0.8901 -0.7274 -0.6206 -0.8901
Q before the first rotation Q after the first rotation
u v u v
[1] [0] 0 [-0.7261] [ 0.6876] 0
[0] [1] 0 -> [-0.6876] [-0.7261] 0
[0] [0] 1 [ 0] [ 0] 1
In the following plot, you can see the growth in x in each of the CORDIC iterations. The growth is factored out at the last step by multiplying it by Kn = 0.60725. You can see that y(1) iterates to 0. Initially, the point [x(1), y(1)] is in the third quadrant and is reflected into the first quadrant before the start of the CORDIC iterations.
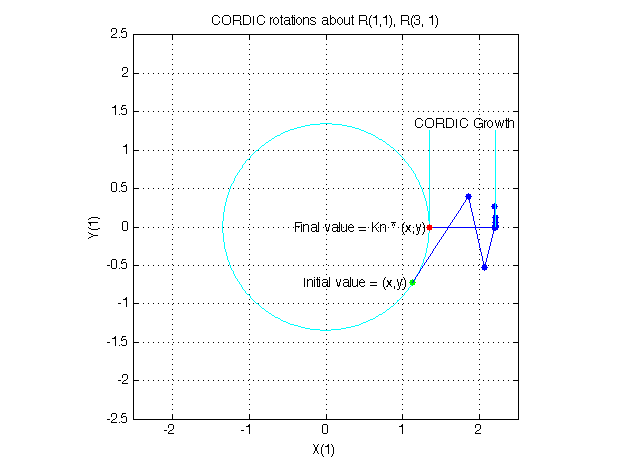
The second rotation is about the first and third row of R and the first and third column of Q. Element R(1,1) is the pivot and R(3,1) rotates to 0.
R before the second rotation R after the second rotation
x [1.1294 -0.2528 0.4918] -> x [1.3434 0.1235 0.8954]
0 0.2527 0.5049 0 0.2527 0.5049
y [-0.7274] -0.6206 -0.8901 -> y [ 0 -0.6586 -0.4820]
Q before the second rotation Q after the second rotation
u v u v
[-0.7261] 0.6876 [0] [-0.6105] 0.6876 [-0.3932]
[-0.6876] -0.7261 [0] -> [-0.5781] -0.7261 [-0.3723]
[ 0] 0 [1] [-0.5415] 0 [ 0.8407]
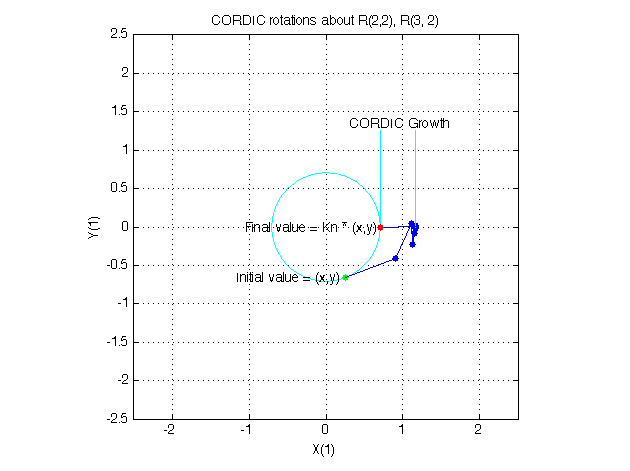
The third rotation is about the second and third row of R and the second and third column of Q. Element R(2,2) is the pivot and R(3,2) rotates to 0.
R before the third rotation R after the third rotation
1.3434 0.1235 0.8954 1.3434 0.1235 0.8954
x 0 [ 0.2527 0.5049] -> x 0 [0.7054 0.6308]
y 0 [-0.6586 -0.4820] -> y 0 [ 0 0.2987]
Q before the third rotation Q after the third rotation
u v u v
-0.6105 [ 0.6876] [-0.3932] -0.6105 [ 0.6134] [ 0.5011]
-0.5781 [-0.7261] [-0.3723] -> -0.5781 [ 0.0875] [-0.8113]
-0.5415 [ 0] [ 0.8407] -0.5415 [-0.7849] [ 0.3011]
This completes the QR factorization. R is upper triangular and Q is orthogonal.
R =
1.3434 0.1235 0.8954
0 0.7054 0.6308
0 0 0.2987
Q = -0.6105 0.6134 0.5011 -0.5781 0.0875 -0.8113 -0.5415 -0.7849 0.3011
You can verify that Q is within roundoff error of being orthogonal by multiplying and seeing that it is close to the identity matrix.
Q*Q' = 1.0000 0.0000 0.0000
0.0000 1.0000 0
0.0000 0 1.0000
Q'*Q = 1.0000 0.0000 -0.0000
0.0000 1.0000 -0.0000
-0.0000 -0.0000 1.0000
You can see the error difference by subtracting the identity matrix.
Q*Q' - eye(size(Q)) = 0 2.7756e-16 3.0531e-16
2.7756e-16 4.4409e-16 0
3.0531e-16 0 6.6613e-16
You can verify that Q*R is close to A by subtracting to see the error difference.
Q*R - A = -3.7802e-11 -7.2325e-13 -2.7756e-17
-3.0512e-10 1.1708e-12 -4.4409e-16
3.6836e-10 -4.3487e-13 -7.7716e-16
Determine the Optimal Output Type of Q for Fixed Word Length
Since Q is orthogonal, all of its values are between -1 and +1. In floating-point, there is no decision about the type of Q: it should be the same floating-point type as A. However, in fixed-point, you can do better than making Q have the identical fixed-point type as A. For example, if A has word length 16 and fraction length 8, and if we make Q also have word length 16 and fraction length 8, then you force Q to be less accurate than it could be and waste the upper half of the fixed-point range.
The best type for Q is to make it have full range of its possible outputs, plus accommodate the 1.6468 CORDIC growth factor in intermediate calculations. Therefore, assuming that the word length of Q is the same as the word length of input A, then the best fraction length for Q is 2 bits less than the word length (one bit for 1.6468 and one bit for the sign).
Hence, our initialization of Q in cordicqr can be improved like this.
if isfi(A) && (isfixed(A) || isscaleddouble(A)) Q = fi(one*eye(m), get(A,'NumericType'), ... 'FractionLength',get(A,'WordLength')-2); else Q = coder.nullcopy(repmat(A(:,1),1,m)); Q(:) = eye(m); end
A slight disadvantage is that this section of code is dependent on data type. However, you gain a major advantage by picking the optimal type for Q, and the main algorithm is still independent of data type. You can do this kind of input parsing in the beginning of a function and leave the main algorithm data-type independent.
Prevent Overflow in Fixed Point R
This section describes how to determine a fixed-point output type for R in order to prevent overflow. In order to pick an output type, you need to know how much the magnitude of the values of R will grow.
Given real matrix A and its QR factorization computed by Givens rotations without pivoting, an upper-bound on the magnitude of the elements of R is the square-root of the number of rows of A times the magnitude of the largest element in A. Furthermore, this growth will never be greater during an intermediate computation. In other words, let [m,n] = size(A), and [Q,R] = givensqr(A). Then
max(abs(R(:))) <= sqrt(m) * max(abs(A(:))).
This is true because each element of R is formed from orthogonal rotations from its corresponding column in A, so the largest that any element R(i,j) can get is if all of the elements of its corresponding column A(:,j) were rotated to a single value. In other words, the largest possible value will be bounded by the 2-norm of A(:,j). Since the 2-norm of A(:,j) is equal to the square-root of the sum of the squares of the m elements, and each element is less-than-or-equal-to the largest element of A, then
norm(A(:,j)) <= sqrt(m) * max(abs(A(:))).
That is, for all j
norm(A(:,j)) = sqrt(A(1,j)^2 + A(2,j)^2 + ... + A(m,j)^2)
<= sqrt( m * max(abs(A(:)))^2)
= sqrt(m) * max(abs(A(:))).
and so for all i,j
abs(R(i,j)) <= norm(A(:,j)) <= sqrt(m) * max(abs(A(:))).
Hence, it is also true for the largest element of R
max(abs(R(:))) <= sqrt(m) * max(abs(A(:))).
This becomes useful in fixed-point where the elements of A are often very close to the maximum value attainable by the data type, so we can set a tight upper bound without knowing the values of A. This is important because we want to set an output type for R with a minimum number of bits, only knowing the upper bound of the data type of A. You can use the fi method upperbound to get this value.
Therefore, for all i,j
abs(R(i,j)) <= sqrt(m) * upperbound(A)
Note that sqrt(m)*upperbound(A) is also an upper bound for the elements of A:
abs(A(i,j)) <= upperbound(A) <= sqrt(m)*upperbound(A)
Therefore, when picking fixed-point data types, sqrt(m)*upperbound(A) is an upper bound that will work for both A and R.
Attaining the maximum is easy and common. The maximum will occur when all elements get rotated into a single element, like the following matrix with orthogonal columns:
A = [7 -7 7 7
7 7 -7 7
7 -7 -7 -7
7 7 7 -7];Its maximum value is 7 and its number of rows is m = 4, so we expect that the maximum value in R will be bounded by max(abs(A(:)))*sqrt(m) = 7*sqrt(4) = 14. Since A in this example is orthogonal, each column gets rotated to the max value on the diagonal.
niter = 52; [Q,R] = cordicqr(A,niter)
Q = 4×4
0.5000 -0.5000 0.5000 0.5000
0.5000 0.5000 -0.5000 0.5000
0.5000 -0.5000 -0.5000 -0.5000
0.5000 0.5000 0.5000 -0.5000
R = 4×4
14.0000 0.0000 -0.0000 -0.0000
0 14.0000 -0.0000 0.0000
0 0 14.0000 0.0000
0 0 0 14.0000
Another simple example of attaining maximum growth is a matrix that has all identical elements, like a matrix of all ones. A matrix of ones will get rotated into 1*sqrt(m) in the first row and zeros elsewhere. For example, this 9-by-5 matrix will have all 1*sqrt(9)=3 in the first row of R.
m = 9; n = 5; A = ones(m,n)
A = 9×5
1 1 1 1 1
1 1 1 1 1
1 1 1 1 1
1 1 1 1 1
1 1 1 1 1
1 1 1 1 1
1 1 1 1 1
1 1 1 1 1
1 1 1 1 1
niter = 52; [Q,R] = cordicqr(A,niter)
Q = 9×9
0.3333 0.5567 -0.6784 0.3035 -0.1237 0.0503 0.0158 0.0056 -0.0921
0.3333 0.0296 0.2498 -0.1702 -0.6336 0.1229 -0.3012 -0.5069 -0.1799
0.3333 0.2401 0.0562 -0.3918 0.4927 0.2048 -0.5395 0.0359 0.3122
0.3333 0.0003 0.0952 -0.1857 0.2148 0.4923 0.7080 -0.2351 -0.0175
0.3333 0.1138 0.0664 -0.2263 0.1293 -0.8348 0.2510 -0.2001 0.0610
0.3333 -0.3973 -0.0143 0.3271 0.4132 -0.0354 -0.2165 -0.0939 -0.6294
0.3333 0.1808 0.3538 -0.1012 -0.2195 0 0.0824 0.7646 -0.2849
0.3333 -0.6500 -0.4688 -0.2380 -0.2400 0 0 0.2300 0.2820
0.3333 -0.0740 0.3400 0.6825 -0.0331 0 0 0 0.5485
R = 9×5
3.0000 3.0000 3.0000 3.0000 3.0000
0 0.0000 0.0000 0.0000 0.0000
0 0 0.0000 0.0000 0.0000
0 0 0 0.0000 0.0000
0 0 0 0 0.0000
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
As in the cordicqr function, the Givens QR algorithm is often written by overwriting A in-place with R, so being able to cast A into R's data type at the beginning of the algorithm is convenient.
In addition, if you compute the Givens rotations with CORDIC, there is a growth-factor that converges quickly to approximately 1.6468. This growth factor gets normalized out after each Givens rotation, but you need to accommodate it in the intermediate calculations. Therefore, the number of additional bits that are required including the Givens and CORDIC growth are log2(1.6468*sqrt(m)). The additional bits of head-room can be added either by increasing the word length, or decreasing the fraction length.
A benefit of increasing the word length is that it allows for the maximum possible precision for a given word length. A disadvantage is that the optimal word length may not correspond to a native type on your processor (e.g. increasing from 16 to 18 bits), or you may have to increase to the next larger native word size which could be quite large (e.g. increasing from 16 to 32 bits, when you only needed 18).
A benefit of decreasing fraction length is that you can do the computation in-place in the native word size of A. A disadvantage is that you lose precision.
Another option is to pre-scale the input by right-shifting. This is equivalent to decreasing the fraction length, with the additional disadvantage of changing the scaling of your problem. However, this may be an attractive option to you if you prefer to only work in fractional arithmetic or integer arithmetic.
Example of Fixed Point Growth in R
If you have a fixed-point input matrix A, you can define fixed-point output R with the growth defined in the previous section.
Start with a random matrix X.
X = [0.0513 -0.2097 0.9492 0.2614
0.8261 0.6252 0.3071 -0.9415
1.5270 0.1832 0.1352 -0.1623
0.4669 -1.0298 0.5152 -0.1461];Create a fixed-point A from X.
A = fi(X,1)
A =
0.0513 -0.2097 0.9492 0.2614
0.8261 0.6252 0.3071 -0.9415
1.5270 0.1832 0.1352 -0.1623
0.4669 -1.0298 0.5152 -0.1461
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 16
FractionLength: 14
m = size(A,1)
m = 4
The growth factor is 1.6468 times the square-root of the number of rows of A. The bit growth is the next integer above the base-2 logarithm of the growth.
bit_growth = ceil(log2(cordic_growth_constant*sqrt(m)))
bit_growth = 2
Initialize R with the same values as A and a word length increased by the bit growth.
R = fi(A,1,get(A,'WordLength')+bit_growth,get(A,'FractionLength'))
R =
0.0513 -0.2097 0.9492 0.2614
0.8261 0.6252 0.3071 -0.9415
1.5270 0.1832 0.1352 -0.1623
0.4669 -1.0298 0.5152 -0.1461
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 18
FractionLength: 14
Use R as input and overwrite it.
niter = get(R,'WordLength') - 1niter = 17
[Q,R] = cordicqr(R, niter)
Q =
0.0284 -0.1753 0.9110 0.3723
0.4594 0.4470 0.3507 -0.6828
0.8490 0.0320 -0.2169 0.4808
0.2596 -0.8766 -0.0112 -0.4050
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 18
FractionLength: 16
R =
1.7989 0.1694 0.4166 -0.6008
0 1.2251 -0.4764 -0.3438
0 0 0.9375 -0.0555
0 0 0 0.7214
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 18
FractionLength: 14
Verify that Q*Q' is near the identity matrix.
double(Q)*double(Q')
ans = 4×4
1.0000 -0.0001 0.0000 0.0000
-0.0001 1.0001 0.0000 -0.0000
0.0000 0.0000 1.0000 -0.0000
0.0000 -0.0000 -0.0000 1.0000
Verify that Q*R - A is small relative to the precision of A.
err = double(Q)*double(R) - double(A)
err = 4×4
10-3 ×
-0.1048 -0.2355 0.1829 -0.2146
0.3472 0.2949 0.0260 -0.2570
0.2776 -0.1740 -0.1007 0.0966
0.0138 -0.1558 0.0417 -0.0362
Increase Precision in R
The previous section showed you how to prevent overflow in R while maintaining the precision of A. If you leave the fraction length of R the same as A, then R cannot have more precision than A and your precision requirements may be such that the precision of R must be greater.
An extreme example of this is to define a matrix with an integer fixed-point type (i.e. fraction length is zero). Let matrix X have elements that are the full range for signed 8 bit integers, between -128 and +127.
X = [-128 -128 -128 127
-128 127 127 -128
127 127 127 127
127 127 -128 -128];Define fixed-point A to be equivalent to an 8-bit integer.
A = fi(X,1,8,0)
A =
-128 -128 -128 127
-128 127 127 -128
127 127 127 127
127 127 -128 -128
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 8
FractionLength: 0
m = size(A,1)
m = 4
The necessary growth is 1.6468 times the square-root of the number of rows of A.
bit_growth = ceil(log2(cordic_growth_constant*sqrt(m)))
bit_growth = 2
Initialize R with the same values as A and allow for bit growth like you did in the previous section.
R = fi(A,1,get(A,'WordLength')+bit_growth,get(A,'FractionLength'))
R =
-128 -128 -128 127
-128 127 127 -128
127 127 127 127
127 127 -128 -128
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 10
FractionLength: 0
Compute the QR factorization, overwriting R.
niter = get(R,'WordLength') - 1;
[Q,R] = cordicqr(R, niter)Q =
-0.5039 -0.2930 -0.4062 -0.6914
-0.5039 0.8750 0.0039 0.0078
0.5000 0.2930 0.3984 -0.7148
0.4922 0.2930 -0.8203 0.0039
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 10
FractionLength: 8
R =
257 126 -1 -1
0 225 151 -148
0 0 211 104
0 0 0 -180
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 10
FractionLength: 0
Notice that R is returned with integer values because you left the fraction length of R at 0, the same as the fraction length of A.
The scaling of the least-significant bit (LSB) of A is 1, and you can see that the error is proportional to the LSB.
err = double(Q)*double(R)-double(A)
err = 4×4
-1.5039 -1.4102 -1.4531 -0.9336
-1.5039 6.3828 6.4531 -1.9961
1.5000 1.9180 0.8086 -0.7500
-0.5078 0.9336 -1.3398 -1.8672
You can increase the precision in the QR factorization by increasing the fraction length. In this example, you needed 10 bits for the integer part (8 bits to start with, plus 2 bits growth), so when you increase the fraction length you still need to keep the 10 bits in the integer part. For example, you can increase the word length to 32 and set the fraction length to 22, which leaves 10 bits in the integer part.
R = fi(A,1,32,22)
R =
-128 -128 -128 127
-128 127 127 -128
127 127 127 127
127 127 -128 -128
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 32
FractionLength: 22
niter = get(R,'WordLength') - 1;
[Q,R] = cordicqr(R, niter)Q =
-0.5020 -0.2913 -0.4088 -0.7043
-0.5020 0.8649 0.0000 0.0000
0.4980 0.2890 0.4056 -0.7099
0.4980 0.2890 -0.8176 0.0000
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 32
FractionLength: 30
R =
255.0020 127.0029 0.0039 0.0039
0 220.5476 146.8413 -147.9930
0 0 208.4793 104.2429
0 0 0 -179.6037
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 32
FractionLength: 22
Now you can see fractional parts in R and Q*R-A is small.
err = double(Q)*double(R)-double(A)
err = 4×4
10-5 ×
-0.1234 -0.0014 -0.0845 0.0267
-0.1234 0.2574 0.1260 -0.1094
0.0720 0.0289 -0.0400 -0.0684
0.0957 0.0818 -0.1034 0.0095
The number of bits you choose for fraction length will depend on the precision requirements for your particular algorithm.
Choose Default Number of Iterations
The number of iterations is dependent on the desired precision, but limited by the word length of A. With each iteration, the values are right-shifted one bit. After the last bit gets shifted off and the value becomes 0, then there is no additional value in continuing to rotate. Hence, the most precision will be attained by choosing niter to be one less than the word length.
For floating-point, the number of iterations is bounded by the size of the mantissa. In double, 52 iterations is the most you can do to continue adding to something with the same exponent. In single, it is 23. See eps for more information about floating-point accuracy.
Thus, we can make our code more usable by not requiring the number of iterations to be input, and assuming that we want the most precision possible by changing cordicqr to use this default for niter.
function [Q,R] = cordicqr(A,varargin) if nargin>=2 && ~isempty(varargin{1}) niter = varargin{1}; elseif isa(A,'double') || isfi(A) && isdouble(A) niter = 52; elseif isa(A,'single') || isfi(A) && issingle(A) niter = single(23); elseif isfi(A) niter = int32(get(A,'WordLength') - 1); else assert(0,'First input must be double, single, or fi.'); end
A disadvantage of doing this is that this makes a section of our code dependent on data type. However, an advantage is that the function is much more convenient to use because you don't have to specify niter if you don't want to, and the main algorithm is still data-type independent. Similar to picking an optimal output type for Q, you can do this kind of input parsing in the beginning of a function and leave the main algorithm data-type independent.
Here is an example from a previous section, without needing to specify an optimal niter.
A = [7 -7 7 7
7 7 -7 7
7 -7 -7 -7
7 7 7 -7];
[Q,R] = cordicqr(A)Q = 4×4
0.5000 -0.5000 0.5000 0.5000
0.5000 0.5000 -0.5000 0.5000
0.5000 -0.5000 -0.5000 -0.5000
0.5000 0.5000 0.5000 -0.5000
R = 4×4
14.0000 0.0000 -0.0000 -0.0000
0 14.0000 -0.0000 0.0000
0 0 14.0000 0.0000
0 0 0 14.0000
Example: QR Factorization Not Unique
When you compare the results from cordicqr and the QR function in MATLAB, you will notice that the QR factorization is not unique. It is only important that Q is orthogonal, R is upper triangular, and Q*R - A is small.
Here is a simple example that shows the difference.
m = 3; A = ones(m)
A = 3×3
1 1 1
1 1 1
1 1 1
The built-in QR function in MATLAB uses a different algorithm.
[Q0,R0] = qr(A)
Q0 = 3×3
-0.5774 -0.5774 -0.5774
-0.5774 0.7887 -0.2113
-0.5774 -0.2113 0.7887
R0 = 3×3
-1.7321 -1.7321 -1.7321
0 0 0
0 0 0
Compare to the cordicqr function.
[Q,R] = cordicqr(A)
Q = 3×3
0.5774 0.7495 0.3240
0.5774 -0.6553 0.4871
0.5774 -0.0942 -0.8110
R = 3×3
1.7321 1.7321 1.7321
0 0.0000 0.0000
0 0 -0.0000
Notice that the elements of Q from function cordicqr are different from Q0 from built-in QR. However, both results satisfy the requirement that Q is orthogonal.
Q0*Q0'
ans = 3×3
1.0000 0.0000 0
0.0000 1.0000 0
0 0 1.0000
Q*Q'
ans = 3×3
1.0000 0.0000 0.0000
0.0000 1.0000 -0.0000
0.0000 -0.0000 1.0000
And they both satisfy the requirement that Q*R - A is small.
Q0*R0 - A
ans = 3×3
10-15 ×
-0.1110 -0.1110 -0.1110
-0.1110 -0.1110 -0.1110
-0.1110 -0.1110 -0.1110
Q*R - A
ans = 3×3
10-15 ×
-0.2220 0.2220 0.2220
0.4441 0 0
0.2220 0.2220 0.2220
Solving Systems of Equations Without Forming Q
Given matrices A and B, you can use the QR factorization to solve for X in the equation
A*X = B.
If A has more rows than columns, then X will be the least-squares solution. If X and B have more than one column, then several solutions can be computed at the same time. If A = Q*R is the QR factorization of A, then the solution can be computed by back-solving
R*X = C
where C = Q'*B. Instead of forming Q and multiplying to get C = Q'*B, it is more efficient to compute C directly. You can compute C directly by applying the rotations to the rows of B instead of to the columns of an identity matrix. The new algorithm is formed by the small modification of initializing C = B, and operating along the rows of C instead of the columns of Q.
function [R,C] = cordicrc(A,B,niter) Kn = inverse_cordic_growth_constant(niter); [m,n] = size(A); R = A; C = B; for j=1:n for i=j+1:m [R(j,j:end),R(i,j:end),C(j,:),C(i,:)] = ... cordicgivens(R(j,j:end),R(i,j:end),C(j,:),C(i,:),niter,Kn); end end end
You can verify the algorithm with this example. Let A be a random 3-by-3 matrix, and B be a random 3-by-2 matrix.
A = [-0.8201 0.3573 -0.0100
-0.7766 -0.0096 -0.7048
-0.7274 -0.6206 -0.8901];
B = [-0.9286 0.3575
0.6983 0.5155
0.8680 0.4863];Compute the QR factorization of A.
[Q,R] = cordicqr(A)
Q = 3×3
-0.6105 0.6133 0.5012
-0.5781 0.0876 -0.8113
-0.5415 -0.7850 0.3011
R = 3×3
1.3434 0.1235 0.8955
0 0.7054 0.6309
0 0 0.2988
Compute C = Q'*B directly.
[R,C] = cordicrc(A,B)
R = 3×3
1.3434 0.1235 0.8955
0 0.7054 0.6309
0 0 0.2988
C = 3×2
-0.3068 -0.7795
-1.1897 -0.1173
-0.7706 -0.0926
Subtract, and you will see that the error difference is on the order of roundoff.
Q'*B - C
ans = 3×2
10-15 ×
-0.0555 0.3331
0 0
0.1110 0.2914
Now try the example in fixed-point. Declare A and B to be fixed-point types.
A = fi(A,1)
A =
-0.8201 0.3573 -0.0100
-0.7766 -0.0096 -0.7048
-0.7274 -0.6206 -0.8901
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 16
FractionLength: 15
B = fi(B,1)
B =
-0.9286 0.3575
0.6983 0.5155
0.8680 0.4863
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 16
FractionLength: 15
The necessary growth is 1.6468 times the square-root of the number of rows of A.
bit_growth = ceil(log2(cordic_growth_constant*sqrt(m)))
bit_growth = 2
Initialize R with the same values as A and allow for bit growth.
R = fi(A,1,get(A,'WordLength')+bit_growth,get(A,'FractionLength'))
R =
-0.8201 0.3573 -0.0100
-0.7766 -0.0096 -0.7048
-0.7274 -0.6206 -0.8901
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 18
FractionLength: 15
The growth in C is the same as R, so initialize C and allow for bit growth the same way.
C = fi(B,1,get(B,'WordLength')+bit_growth,get(B,'FractionLength'))
C =
-0.9286 0.3575
0.6983 0.5155
0.8680 0.4863
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 18
FractionLength: 15
Compute C = Q'*B directly, overwriting R and C.
[R,C] = cordicrc(R,C)
R =
1.3435 0.1233 0.8954
0 0.7055 0.6308
0 0 0.2988
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 18
FractionLength: 15
C =
-0.3068 -0.7796
-1.1898 -0.1175
-0.7706 -0.0926
DataTypeMode: Fixed-point: binary point scaling
Signedness: Signed
WordLength: 18
FractionLength: 15
An interesting use of this algorithm is that if you initialize B to be the identity matrix, then output argument C is Q'. You may want to use this feature to have more control over the data type of Q. For example,
A = [-0.8201 0.3573 -0.0100
-0.7766 -0.0096 -0.7048
-0.7274 -0.6206 -0.8901];
B = eye(size(A,1))B = 3×3
1 0 0
0 1 0
0 0 1
[R,C] = cordicrc(A,B)
R = 3×3
1.3434 0.1235 0.8955
0 0.7054 0.6309
0 0 0.2988
C = 3×3
-0.6105 -0.5781 -0.5415
0.6133 0.0876 -0.7850
0.5012 -0.8113 0.3011
Then C is orthogonal
C'*C
ans = 3×3
1.0000 0.0000 0.0000
0.0000 1.0000 -0.0000
0.0000 -0.0000 1.0000
and R = C*A
R - C*A
ans = 3×3
10-15 ×
0.6661 -0.0139 -0.1110
0.5551 -0.2220 0.6661
-0.2220 -0.1110 0.2776
Functions Used in This Example
These are the MATLAB functions used in this example.
CORDICQR computes the QR factorization using CORDIC.
[Q,R] = cordicqr(A)chooses the number of CORDIC iterations based on the type of A.[Q,R] = cordicqr(A,niter)usesniternumber of CORDIC iterations.
CORDICRC computes R from the QR factorization of A, and also returns C = Q'*B without computing Q.
[R,C] = cordicrc(A,B)chooses the number of CORDIC iterations based on the type of A.[R,C] = cordicrc(A,B,niter)usesniternumber of CORDIC iterations.
CORDIC_GROWTH_CONSTANT returns the CORDIC growth constant.
cordic_growth = cordic_growth_constant(niter)returns the CORDIC growth constant as a function of the number of CORDIC iterations,niter.
GIVENSQR computes the QR factorization using standard Givens rotations.
[Q,R] = givensqr(A), where A is M-by-N, produces an M-by-N upper triangular matrix R and an M-by-M orthogonal matrix Q so that A = Q*R.
CORDICQR_MAKEPLOTS makes the plots in this example by executing the following from the MATLAB command line.
load A_3_by_3_for_cordicqr_demo.mat
niter = 32;
[Q,R] = cordicqr_makeplots(A,niter)
References
Ray Andraka, "A survey of CORDIC algorithms for FPGA based computers," 1998, ACM 0-89791-978-5/98/01.
Anthony J Cox and Nicholas J Higham, "Stability of Householder QR factorization for weighted least squares problems," in Numerical Analysis, 1997, Proceedings of the 17th Dundee Conference, Griffiths DF, Higham DJ, Watson GA (eds). Addison-Wesley, Longman: Harlow, Essex, U.K., 1998; 57-73.
Gene H. Golub and Charles F. Van Loan, Matrix Computations, 3rd ed, Johns Hopkins University Press, 1996, section 5.2.3 Givens QR Methods.
Daniel V. Rabinkin, William Song, M. Michael Vai, and Huy T. Nguyen, "Adaptive array beamforming with fixed-point arithmetic matrix inversion using Givens rotations," Proceedings of Society of Photo-Optical Instrumentation Engineers (SPIE) -- Volume 4474 Advanced Signal Processing Algorithms, Architectures, and Implementations XI, Franklin T. Luk, Editor, November 2001, pp. 294--305.
Jack E. Volder, "The CORDIC Trigonometric Computing Technique," Institute of Radio Engineers (IRE) Transactions on Electronic Computers, September, 1959, pp. 330-334.
Musheng Wei and Qiaohua Liu, "On growth factors of the modified Gram-Schmidt algorithm," Numerical Linear Algebra with Applications, Vol. 15, issue 7, September 2008, pp. 621-636.
%#ok<*MNEFF,*NASGU,*NOPTS,*ASGLU>