Cuboid To 3D Simulation
액터를 직육면체 좌표에서 3차원 시뮬레이션 좌표로 변환
라이브러리:
Automated Driving Toolbox /
Driving Scenario and Sensor Modeling
설명
Cuboid To 3D Simulation 블록은 세계 좌표의 직육면체 액터 자세를 Simulation 3D Vehicle with Ground Following 블록에서 사용되는 X, Y, 요 좌표로 변환합니다. 변환된 값을 사용하여, 주행 시나리오 디자이너 앱으로 생성한 액터의 3차원 시뮬레이션 환경 내에 차량 위치를 설정합니다. 장면의 지면 지형은 차량의 롤(x축 회전), 피치(y축 회전), 고도(z축 위치)를 결정합니다.
단일 액터 자세 또는 여러 액터 자세가 포함된 버스를 지정할 수 있습니다. 기본적으로, 이 블록은 버스에 있는 첫 번째 액터의 자세를 변환합니다. 자세를 변환할 액터를 지정하려면 해당 액터의 ActorID를 지정합니다.
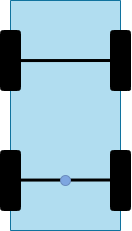
직육면체 주행 시나리오와 3차원 시뮬레이션 주행 시나리오에서 좌표계는 동일하지만, 차량의 원점은 다릅니다. 직육면체 주행 시나리오에서 차량 원점은 뒤 차축 중심 아래의 지면에 있습니다. 이 블록은 이 원점을 차량의 기하 중심 아래에 있는 3차원 시뮬레이션 환경에서 사용되는 원점으로 변환합니다. 다음 표는 두 환경 간의 원점 차이를 보여줍니다. 직육면체 주행 시나리오는 Scenario Reader 블록을 사용하여 읽어와야 합니다.
| 직육면체 차량 원점 | 3차원 시뮬레이션 차량 원점 |
|---|---|
|
|

예제

Visualize Sensor Data from Unreal Engine Simulation Environment
Visualize sensor coverage areas and detections obtained from high-fidelity radar and lidar sensors in the Unreal Engine® simulation environment.
포트
입력
출력
파라미터
확장 기능
버전 내역
R2020a에 개발됨