강화 학습
강화 학습은 에이전트가 알려지지 않은 동적 환경과 상호 작용하여 작업을 수행하는 방법을 학습하는 목표 지향 계산 학습 방식입니다. 이 학습 알고리즘은 훈련하는 동안 에이전트 정책 파라미터를 업데이트합니다. 학습 알고리즘의 목표는 작업을 수행하면서 받는 누적 감가 장기 보상의 기대치를 극대화하는 최적의 정책을 찾는 것입니다.
이 학습 방식에서는 사람의 개입 없이 그리고 목표 달성을 위한 명시적인 프로그래밍 없이도 에이전트가 작업의 누적 보상을 극대화하기 위한 일련의 결정을 내릴 수 있습니다. Reinforcement Learning Toolbox™를 사용하여 강화 학습 에이전트를 만들고 훈련시킬 수 있습니다.
자세한 내용은 강화 학습이란? (Reinforcement Learning Toolbox) 항목을 참조하십시오.
도움말 항목
- 강화 학습이란? (Reinforcement Learning Toolbox)
강화 학습은 목표 지향적인 연산 접근법으로, 컴퓨터가 불확실한 동적 환경과 상호 작용하여 작업 수행 방법을 학습하는 유형입니다.
- 강화 학습 워크플로 (Reinforcement Learning Toolbox)
문제에 강화 학습을 적용할 때 사용하는 일반적인 워크플로.
- Reinforcement Learning Environments (Reinforcement Learning Toolbox)
Model environment dynamics using a MATLAB® object that generates rewards and observations in response to agents actions.
- 제어 시스템 응용 사례를 위한 강화 학습 (Reinforcement Learning Toolbox)
강화 학습 에이전트를 훈련시켜 플랜트를 제어할 수 있습니다.
- MDP 환경에서 강화 학습 에이전트 훈련시키기 (Reinforcement Learning Toolbox)
일반 마르코프 결정 과정 환경에서 강화 학습 에이전트를 훈련시킵니다.
- 기본 그리드 월드에서 강화 학습 에이전트 훈련시키기 (Reinforcement Learning Toolbox)
MATLAB에서 그리드 월드를 풀도록 Q-러닝 및 SARSA 에이전트를 훈련시킵니다.
- 강화 학습 디자이너를 사용하여 에이전트 설계 및 훈련하기 (Reinforcement Learning Toolbox)
강화 학습 디자이너 앱을 사용하여 카트-폴 시스템에 대한 DQN 에이전트를 설계하고 훈련시킵니다.
- Create DQN Agent Using Deep Network Designer and Train Using Image Observations (Reinforcement Learning Toolbox)
Create a reinforcement learning agent using the Deep Network Designer app from the Deep Learning Toolbox™.
- Train DDPG Agent with Custom Networks Using Image Observation (Reinforcement Learning Toolbox)
Train a DDPG agent with custom networks using an image-based observation signal.
- DDPG 에이전트를 사용하여 탱크의 수위 제어하기 (Reinforcement Learning Toolbox)
Simulink®에서 모델링된 플랜트를 훈련 환경으로 설정하여 강화 학습을 사용해 제어기를 훈련시킵니다.
추천 예제

Train DQN Agent for Lane Keeping Assist Using Parallel Computing
Train a DQN agent for an automated driving application using parallel computing.

Deep Reinforcement Learning for Optimal Trade Execution
Use the Reinforcement Learning Toolbox™ and Deep Learning Toolbox™ to design agents for optimal trade execution.
Train Biped Robot to Walk Using Reinforcement Learning Agents
Compare DDPG and TD3 agent for the control a biped walking robot modeled in Simscape™ Multibody™.
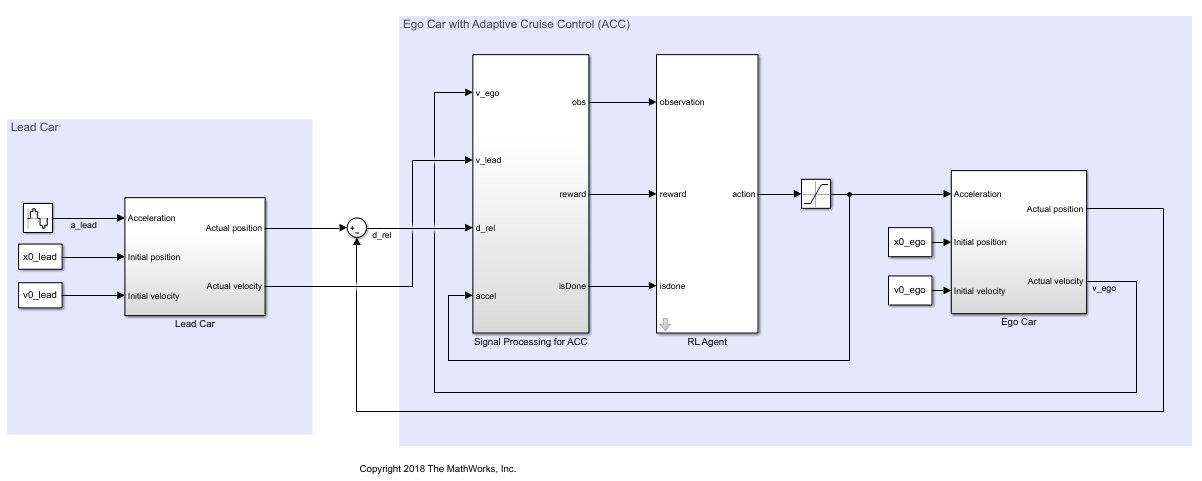
적응형 크루즈 컨트롤을 위해 DDPG 에이전트 훈련시키기
적응형 크루즈 컨트롤 응용 사례를 위해 DDPG 에이전트를 훈련시킵니다.

Train Hybrid SAC Agent for Path-Following Control
Train a hybrid SAC agent for lane following control.

Automatic Parking Valet with Unreal Engine Simulation
Use a TD3 agent with an MPC controller to perform a parking maneuver.

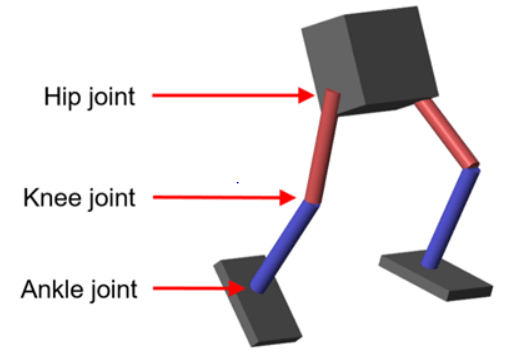
Train Humanoid Walker
Model a humanoid robot using Simscape Multibody™ and train it using either a genetic algorithm (which requires a Global Optimization Toolbox license) or reinforcement learning (which requires Deep Learning Toolbox™ and Reinforcement Learning Toolbox™ licenses).
Train Policy Deployed on Raspberry Pi
Use trainFromData in a MATLAB learning loop to train a policy
deployed on a Raspberry Pi board.