mskmod
최소 편이 변조
구문
설명
예제
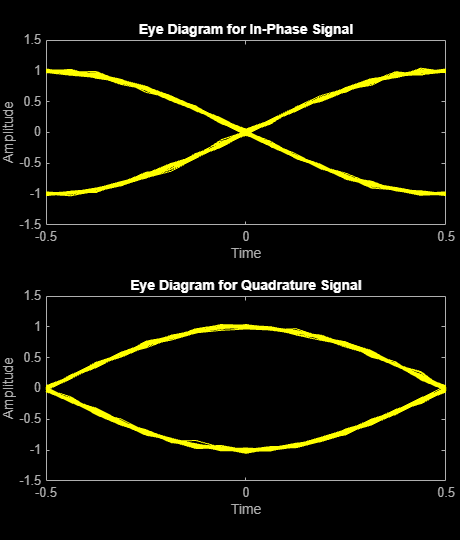
MSK(최소 편이 변조)를 사용하여 신호를 변조하고 Eye 다이어그램(아이 다이어그램)을 생성합니다.
랜덤 이진 신호를 생성합니다.
x = randi([0 1],100,1);
신호에 MSK 변조를 적용합니다.
y = mskmod(x,8,[],pi/2);
신호를 가산성 백색 가우스 잡음(AWGN) 채널에 통과시킵니다. 신호 대 잡음비를 30dB로 설정합니다.
z = awgn(y,30,'measured');Eye 다이어그램을 표시합니다.
eyediagram(z,16);
입력 인수
출력 인수
참고 문헌
[1] Pasupathy, S. “Minimum Shift Keying: A Spectrally Efficient Modulation.”IEEE® Communications Magazine (July, 1979): 14–22.