comm.gpu.LDPCDecoder
(To be removed) Decode binary low-density parity-check (LDPC) code with GPU
comm.gpu.LDPCDecoder will be removed in a future release. Use ldpcDecode
instead. (since R2024b) For more information on updating your code, see Version History.
To use this object, you must install Parallel Computing Toolbox™ and have access to a supported GPU. If the host computer has a GPU configured, processing uses the GPU. Otherwise, processing uses the CPU. For more information about GPUs, see GPU Computing (Parallel Computing Toolbox).
Description
The comm.gpu.LDPCDecoder
System object™ uses the belief propagation algorithm to decode a binary LDPC code, which is
input to the object as the soft-decision output (log-likelihood ratio of received bits) from
demodulation. The object decodes generic binary LDPC codes where no patterns in the
parity-check matrix are assumed. For more information, see Belief Propagation Decoding.
To decode an LDPC-encoded signal:
Create the
comm.gpu.LDPCDecoderobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
gpu_ldpcdecoder = comm.gpu.LDPCDecoder
gpu_ldpcdecoder = comm.gpu.LDPCDecoder(parity)ParityCheckMatrix property to parity and
creates a GPU-based LDPC decoder System object. The parity input must be specified as described by the
ParityCheckMatrix property.
gpu_ldpcdecoder = comm.gpu.LDPCDecoder(___,Name=Value)comm.gpu.LDPCDecoder(DecisionMethod='Soft
decision') configures an LDPC decoder System object to decode data using the soft-decision method and output log-likelihood
ratios of data type double. Enclose each property name in
quotes.
Properties
Usage
Syntax
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Limitations
The
comm.gpu.LDPCDecoderSystem object cannot be included in MATLAB System (Simulink) blocks.
More About
Algorithms
This object performs LDPC decoding using the belief propagation algorithm, also known as a message-passing algorithm.
The implementation of the belief propagation algorithm is based on the decoding algorithm presented by Gallager [2].
For transmitted LDPC-encoded codeword c = c0, c1, …, cn-1, the input to the LDPC decoder is the log-likelihood ratio (LLR) value .
In each iteration, the key components of the algorithm are updated based on these equations:
,
, initialized as before the first iteration, and
.
At the end of each iteration, L(Qi) contains the updated estimate of the LLR value for transmitted bit ci. The value L(Qi) is the soft-decision output for ci. If L(Qi) ≤ 0, the hard-decision output for ci is 1. Otherwise, the hard-decision output for ci is 0.
If decoding is configured to stop when all of the parity checks are satisfied, the algorithm verifies the parity-check equation (H c' = 0) at the end of each iteration. When all of the parity checks are satisfied, or if the maximum number of iterations is reached, decoding stops.
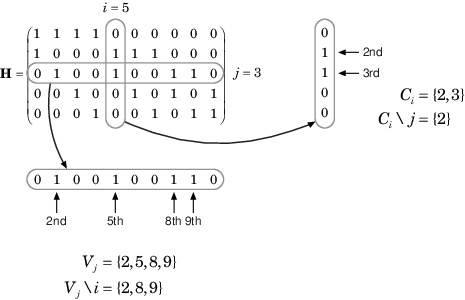
Index sets and are based on the parity-check matrix (PCM). Index sets Ci and Vj correspond to all nonzero elements in column i and row j of the PCM, respectively.
This figure shows the computation of these index sets in a given PCM for i = 5 and j = 3.
To avoid infinite numbers in the algorithm equations, atanh(1) and atanh(–1) are set to 19.07 and –19.07, respectively. Due to finite precision, MATLAB returns 1 for tanh(19.07) and –1 for tanh(-19.07).
References
[1] Gallager, Robert G. Low-Density Parity-Check Codes. Cambridge, MA: MIT Press, 1963.
Extended Capabilities
Version History
Introduced in R2012aSee Also
Objects
ldpcDecoderConfig|comm.BCHDecoder|gpuArray(Parallel Computing Toolbox)
Functions
Blocks
Topics
- GPU Arrays Support List for System Objects
- GPU Computing (Parallel Computing Toolbox)
- Accelerate Simulation Using GPUs