Deployment on Cube Blue H7 Autopilot from Simulink
This topic helps you to get started with Cube Blue H7 Autopilot. Before starting Simulink®, install the version 4.3.0 of QGroundControl and upload latest stable version of PX4 Firmware from QGroundControl. If you are unable to create a USB connection, install Mission planner and install the latest drivers as described here.
After you successfully upload the PX4® firmware from QGroundControl, get started with UAV Toolbox Support Package for PX4 Autopilots.
Once the hardware setup is completed and the PX4 Firmware is successfully built for the selected build target, you can use your Cube Blue H7 autopilot in Simulink by selecting PX4 Cube Blue H7 as the hardware board in the Simulink model configuration settings.
Select PX4 Cube Blue H7 in Hardware Setup
If the support package is already installed, start the hardware setup by opening the Add-On Manager.

In the Add-On Manager, start the hardware setup process by clicking the Setup button
 .
.The Hardware Setup window provides instructions for configuring the support package to work with your hardware.
On the Select a PX4 Autopilot and Build Target page, select
PX4 Cube Blue H7.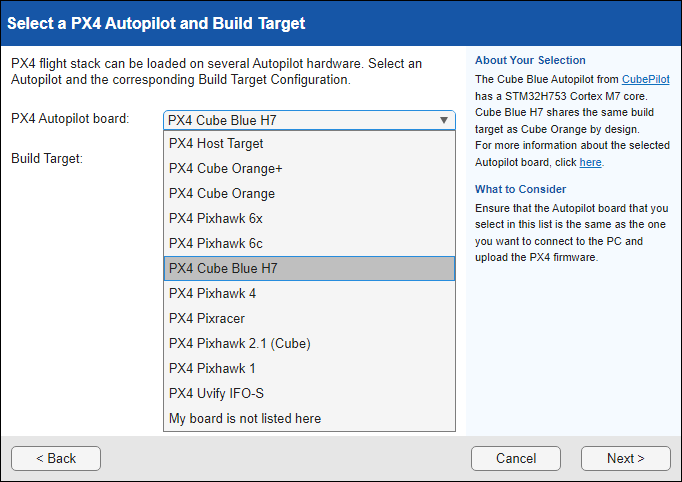
Select the corresponding CMake Build target (
cubepilot_cubeblue_multicopter) from the Build Target drop-down list.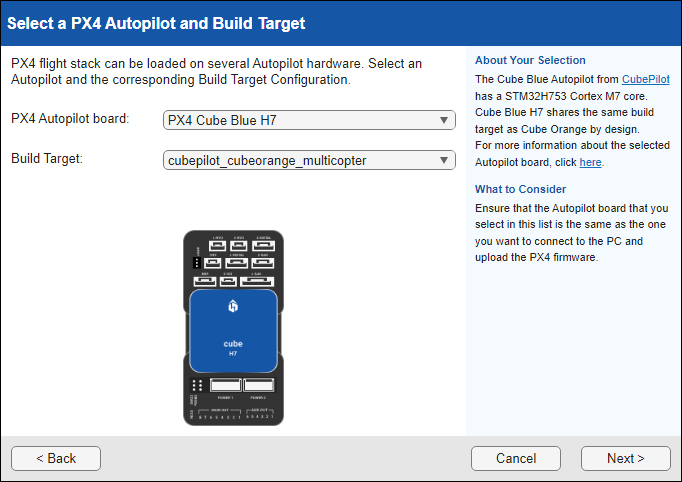
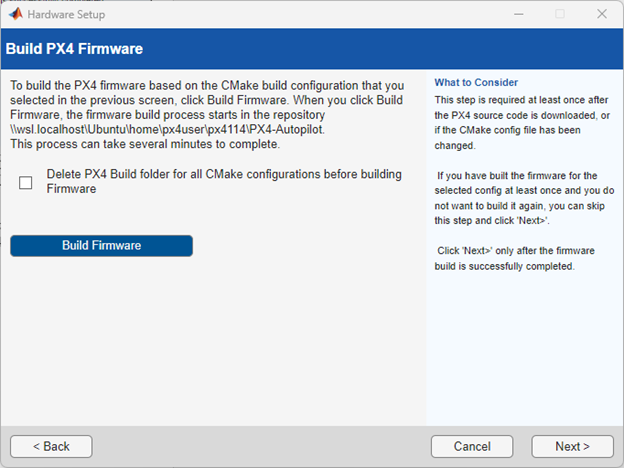
Click Next and complete the instructions on the page.
Click Build PX4 Firmware on the Build PX4 Firware page to complete the setup.
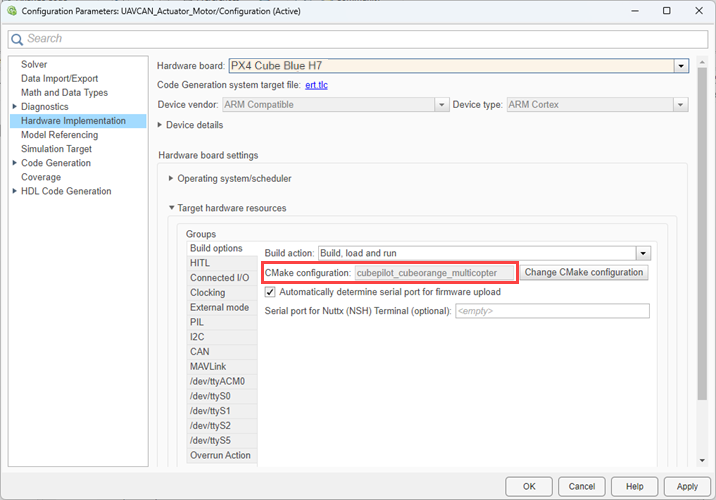
Select PX4 Cube Blue H7 as Simulink Target Hardware
After hardware setup is completed and the PX4 Firmware is successfully built for the selected build target, you can use your Cube Blue H7 autopilot in Simulink by selecting PX4 Cube Blue H7 as the hardware board in the Simulink model configuration settings.
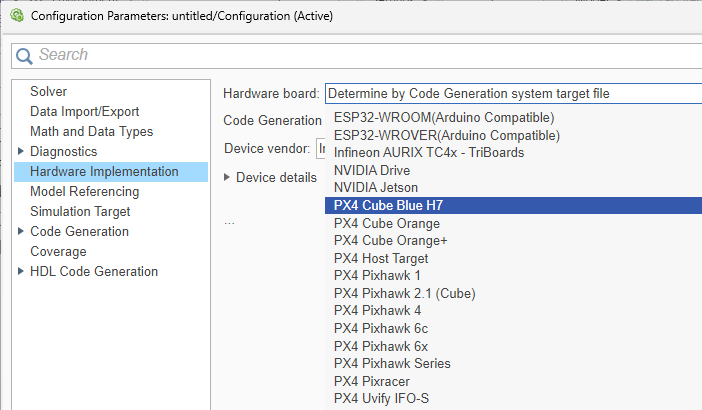
The CMake build target the you select in the hardware setup automatically appears in the CMake configuration.
Note
If you are using Cube Blue H7 autopilot, use the GPS2 port for monitoring and
tuning parameters over a non-USB port connection, as there might be issues with
the TELEM1 or TELEM2 ports.