행렬 회전 및 변환
이 예제에서는 Symbolic Math Toolbox™와 행렬을 사용하여 3차원으로 회전 및 변환을 수행하는 방법을 보여줍니다.
파라미터 곡면을 정의하고 플로팅하기
파라미터 곡면 x(u,v), y(u,v), z(u,v)를 다음과 같이 정의합니다.
syms u v x = cos(u)*sin(v); y = sin(u)*sin(v); z = cos(v)*sin(v);
fsurf를 사용하여 곡면을 플로팅합니다.
fsurf(x,y,z)
axis equal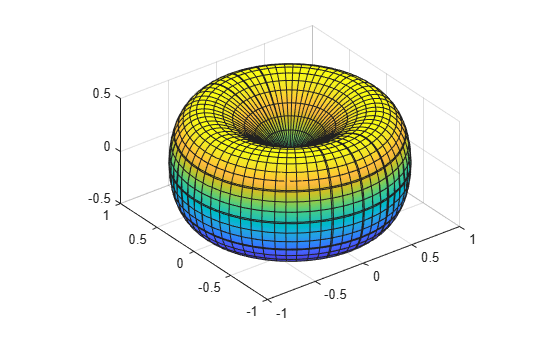
회전 행렬 만들기
x축, y축, z축을 중심으로 각도 t로 평면 회전을 나타내는 3×3 행렬 Rx, Ry, Rz를 만듭니다.
syms t
Rx = [1 0 0; 0 cos(t) -sin(t); 0 sin(t) cos(t)]Rx =
Ry = [cos(t) 0 sin(t); 0 1 0; -sin(t) 0 cos(t)]
Ry =
Rz = [cos(t) -sin(t) 0; sin(t) cos(t) 0; 0 0 1]
Rz =
3차원에서 각 축을 중심으로 회전하기
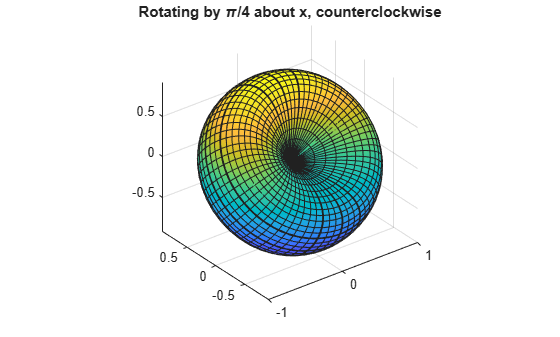
먼저 곡면을 x축을 중심으로 시계 반대 방향으로 45도 회전합니다.
xyzRx = Rx*[x;y;z]; Rx45 = subs(xyzRx, t, pi/4); fsurf(Rx45(1), Rx45(2), Rx45(3)) title('Rotating by \pi/4 about x, counterclockwise') axis equal
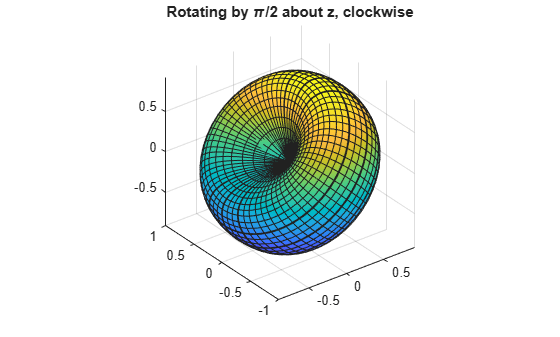
z축을 중심으로 시계 방향으로 90도 회전합니다.
xyzRz = Rz*Rx45; Rx45Rz90 = subs(xyzRz, t, -pi/2); fsurf(Rx45Rz90(1), Rx45Rz90(2), Rx45Rz90(3)) title('Rotating by \pi/2 about z, clockwise') axis equal
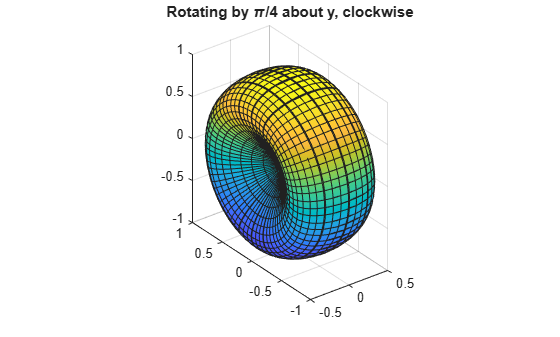
y축을 중심으로 시계 방향으로 45도 회전합니다.
xyzRy = Ry*Rx45Rz90; Rx45Rz90Ry45 = subs(xyzRy, t, -pi/4); fsurf(Rx45Rz90Ry45(1), Rx45Rz90Ry45(2), Rx45Rz90Ry45(3)) title('Rotating by \pi/4 about y, clockwise') axis equal
스케일 및 회전하기
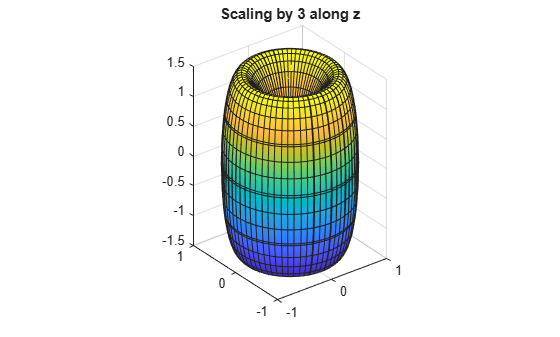
z축을 따라 인자를 3으로 하여 곡면을 스케일링합니다. z에 대한 표현식에 3을 곱할 수 있습니다(z = 3*z). 보다 일반적인 접근 방식은 스케일링 행렬을 만든 다음 이 스케일링 행렬에 좌표 벡터를 곱하는 것입니다.
S = [1 0 0; 0 1 0; 0 0 3]; xyzScaled = S*[x; y; z]
xyzScaled =
fsurf(xyzScaled(1), xyzScaled(2), xyzScaled(3)) title('Scaling by 3 along z') axis equal
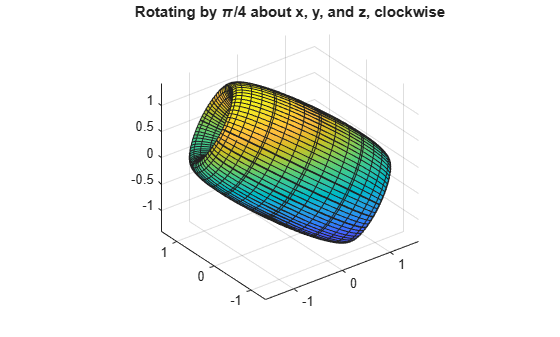
스케일링된 곡면을 x축, y축, z축을 중심으로 시계 방향으로 45도 회전합니다. 이때 z, y, x의 순서로 회전하십시오. 이 변환에 대한 회전 행렬은 다음과 같습니다.
R = Rx*Ry*Rz
R =
회전 행렬을 사용하여 새로운 좌표를 구합니다.
xyzScaledRotated = R*xyzScaled; xyzSR45 = subs(xyzScaledRotated, t, -pi/4);
곡면을 플로팅합니다.
fsurf(xyzSR45(1), xyzSR45(2), xyzSR45(3)) title('Rotating by \pi/4 about x, y, and z, clockwise') axis equal
회전 행렬 R의 속성 확인하기
회전 행렬은 직교 행렬입니다. 따라서 R의 전치는 역행렬이기도 하며 R의 행렬식은 1입니다.
simplify(R.'*R)
ans =
simplify(det(R))
ans =