Plot Turtlebot Odometry
This example shows how to get, store, and display odometry data from a TurtleBot® as it drives in an environment.
Connect to TurtleBot
Description of first code block
ipaddress = '192.168.192.130'; % IP address of your robot tbot = turtlebot(ipaddress,11311); tbot.Velocity.TopicName = '/cmd_vel';
Get Odometry Data
Use getOdometry to get a single odometry point off the TurtleBot. The function returns the position and orientation as [x y z] coordinates and [yaw pitch roll] angles.
odom = getOdometry(tbot)
odom = struct with fields:
Position: [4.3772 1.4580 -0.0010]
Orientation: [-2.2936 0.0032 7.8259e-06]
Send velocity commands to change the position of the robot. To note the change in position, reset the odometry first. Use setVelocity to drive the robot forward for 2 seconds and wait for the robot to execute this command.
resetOdometry(tbot)
setVelocity(tbot,0.5,'Time',2)Get the odometry after the velocity command is sent. The x-coordinate of odom.Position reflects the change in position. A velocity of 0.5 m/s for 2 seconds yields a displacement of 1m in the x direction as expected.
odom = getOdometry(tbot)
odom = struct with fields:
Position: [3.2717 0.7216 -0.0010]
Orientation: [-2.6151 0.0032 -1.5861e-05]
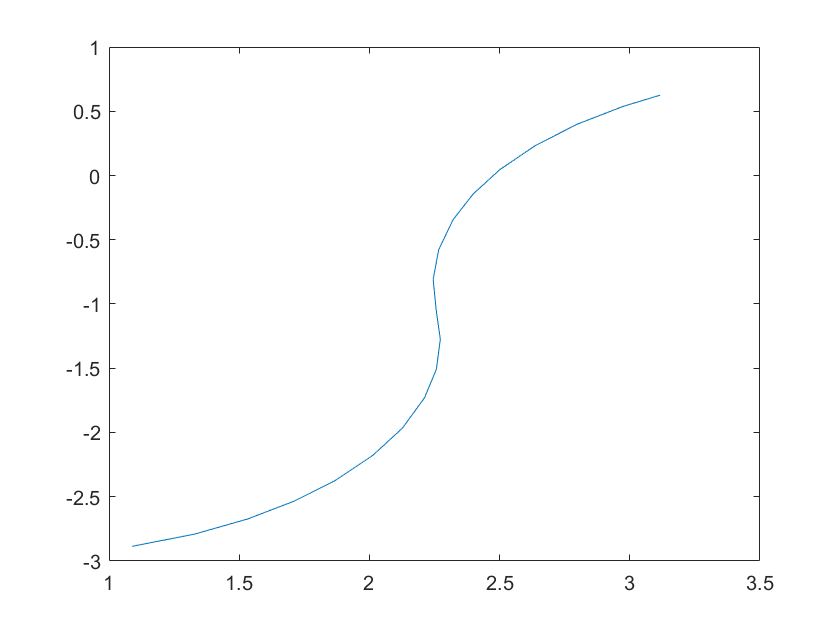
Plot Odometry Data Points
You can store odometry data to get a full trajectory of a robot path as it navigates through its environment.
Start a loop to store the odometry position and then send a velocity command. This loop runs 20 times to create a basic two-turn trajectory. Plot the trajectory.
odomList = zeros(20,2); resetOdometry(tbot) for i = 1:20 odom = getOdometry(tbot); odomList(i,:) = [odom.Position(1) odom.Position(2)]; if i < 10 setVelocity(tbot,0.25,0.15) else setVelocity(tbot,0.25,-0.15) end pause(1); end plot(odomList(:,1),odomList(:,2))
See Also
turtlebot | getOdometry | setVelocity
Related Topics
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)