이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
Simulink 함수를 사용하여 전환 제어기 설계하기
이 예제에서는 Stateflow® 차트를 사용하여 P 전용 제어기와 PID 제어기 간에 전환하는 의사 결정 로직을 모델링하는 방법을 보여줍니다.
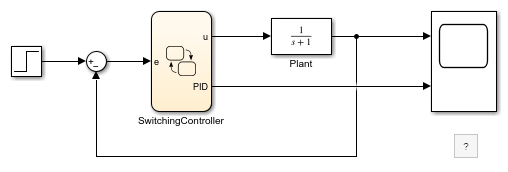
Stateflow 차트 SwitchingController는 제어기의 오차를 나타내는 입력 데이터 e의 값에 따라 STEADY, P, PID 상태 간에 전환하는 제어기를 구현합니다. 차트는 제어 값 u와 PID 상태의 활성 여부를 나타내는 부울 값 PID를 출력합니다.
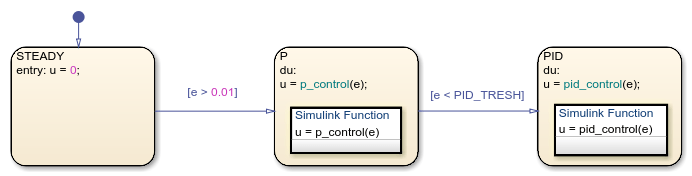
초기에는 STEADY 상태가 활성이며, 차트가 출력하는 제어 출력값 u는 0입니다. e가 0.01보다 크면 차트가 STEADY에서 P로 전환됩니다. e가 모델 작업 공간에 정의된 파라미터 PID_TRESH보다 작으면 차트가 P에서 PID로 전환됩니다.
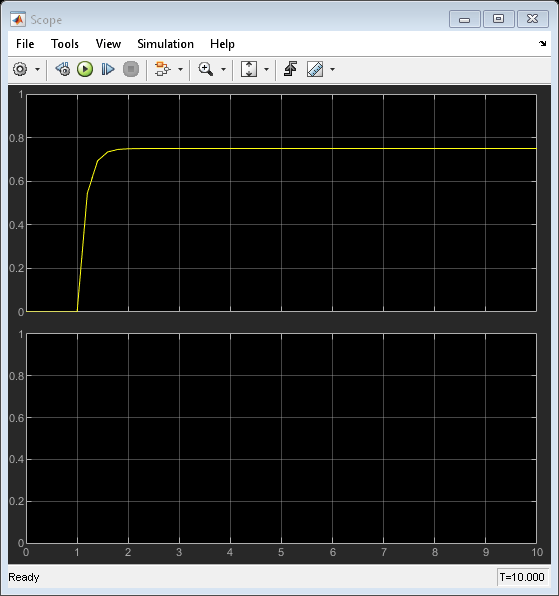
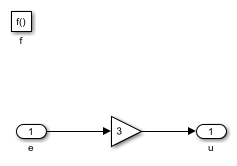
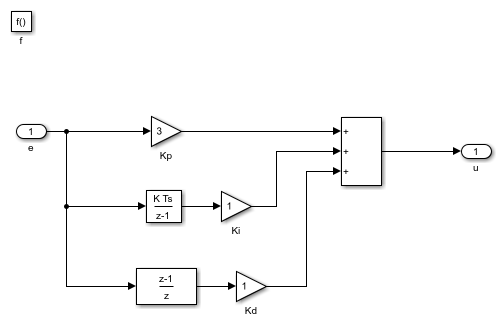
P 상태에서는 Simulink® 함수 p_control이 이득 3으로 비례 제어 전략을 구현합니다. 이 상태가 활성일 때, 폐루프 시스템의 정상 상태 이득은 3/4 = 0.75이며, 따라서 오차는 0.25입니다.
PID 상태에서는 Simulink 함수 pid_control이 PID 제어 전략을 구현합니다. 제어 노력을 통한 천이가 원활하게 이루어지도록 하기 위해 함수는 p_control과 동일한 비례 이득을 갖습니다.
초기에 파라미터 PID_THRESH의 값은 0.3입니다. 모델을 시뮬레이션하면 시간 ![]() 에 오차가 이 임계값을 넘어갑니다. 그러면 차트가 PID 제어기로 전환되며, 정상 상태 오차가 0에 가까워집니다.
에 오차가 이 임계값을 넘어갑니다. 그러면 차트가 PID 제어기로 전환되며, 정상 상태 오차가 0에 가까워집니다.
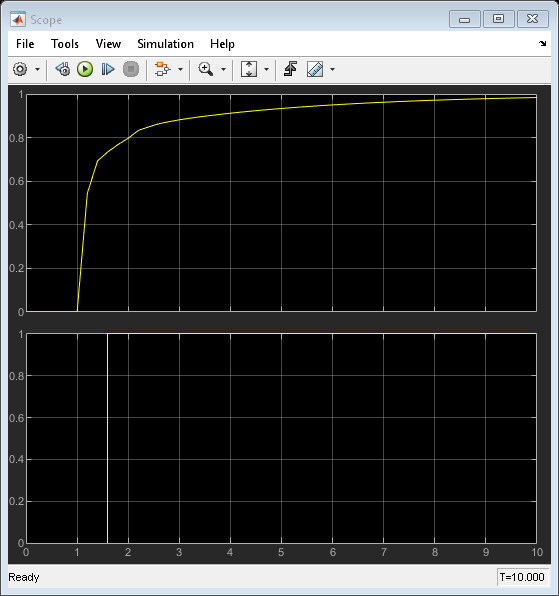
파라미터 PID_TRESH 값을 0.1로 변경하면, 오차는 절대 이 임계값 아래로 떨어지지 않습니다. 차트는 무한정 P 상태를 유지하며, 오차는 0.25에서 안정화됩니다.