Synchronous Machine Initialization with Loadflow
This example shows how to initialize synchronous machine as part of a load flow analysis. When initializing a synchronous machine there are two degrees of freedom which can be set by any two of rotor angle, active power, reactive power and terminal voltage. The pair of variables that are constrained is set by the source type drop-down menu, this having options of Swing bus, PV bus and PQ bus. Here the machine is configured for a swing bus with a 1.02 per-unit voltage and zero degrees phase.
The shaft torque is set to 30MW divided by the synchronous mechanical speed. This is only an approximate value, but any difference to the value required for steady state will just result in a non-zero initial acceleration for the machine inertia. This will not change load flow results for the rest of the electrical network. Similarly the AVR is initialized close to the expected steady state field voltage, but any difference to the required value only creates an initial transient for field winding flux linkage. Again, this does not impact load flow results for the rest of the electrical network.
Exact values for the AVR and shaft torque for steady state can be determined after the initial load flow solution is found. This is done by setting the initialization option to Set real power, reactive power, terminal voltage, and terminal phase. The load flow solution can then be copied to the four corresponding parameters. To display the initial mechanical torque and field circuit voltage in the MATLAB® Command Window, double-click the block and, in the Utilities section, click the Display button next to the Associated initial conditions parameter.
Model

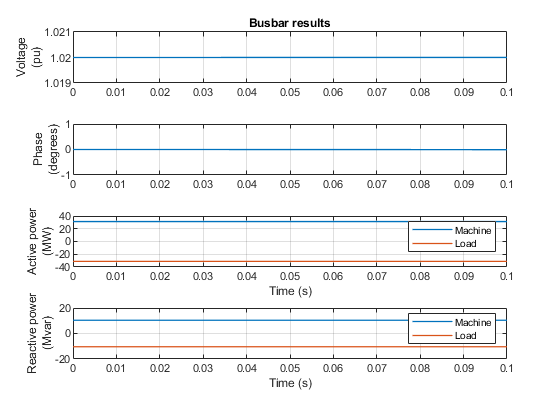
Simulation Results from Simscape Logging
The plot below shows the simulation results following the steady state initialization to meet load flow targets. The ramp away from the steady state solution reflects that the governor and AVR are not modeled here. However, the initial values show that the loadflow targets are met.
See Also
Synchronous Machine Salient Pole | Busbar | Load-Flow Analyzer