Gravitational Field
Model gravitational field

Libraries:
Simscape /
Multibody /
Forces and Torques
Description
The Gravitational Field block models a gravitational field centered at the base frame of the block. The field applies a gravitational force at the center of mass (COM) of each rigid body in the connected mechanism. The block applies force to each rigid body COM, even when bodies connect through a Weld Joint block.
Model the gravitational field with either the point mass gravity model or the spherical harmonic gravity model.
Point Mass Model
Set Gravity Type to Point Mass to model
gravity from a single point source. The gravitational force follows Newton’s law of
universal gravitation
where:
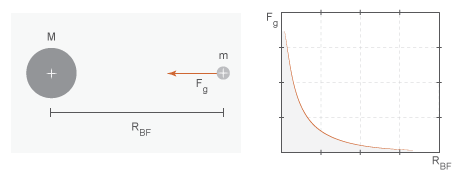
Fg is the gravitational force on the rigid body.
G is the universal gravitational constant, 6.67384 × 10-11 m3kg-1s-2.
M is the mass of the point source that generates the gravitational field.
m is the mass of the rigid body, which can be either positive or negative.
RBF is the distance between the source mass and the COM of the rigid body.
The figure below shows these variables and the inverse-square relationship between force and distance.
Spherical Harmonic Model
Set Gravity Type to Spherical Harmonic
to model spherical harmonic gravitational fields. The Spherical Harmonic model requires an
Aerospace Toolbox license.
Limitations
The block does not apply gravitational forces to flexible bodies within the connected mechanism.