시스템 알고리즘 모델링하기
불완전한 시스템 요구 사항과 아직 개발 중인 시스템 설계로 인해 파일 관리와 모델 아키텍처를 미리 정의할 수 없는 경우에도 기본적인 시스템 알고리즘을 모델링할 수 있습니다. 모델을 입력, 출력, 시스템으로 정리하여 성장하고 있는 모델에도 적용할 수 있는 모델 구성 요소의 일반적인 프레임워크를 만듭니다.
제한된 정보로 시작하는 모델링 워크플로의 첫 번째 단계를 보여주기 위해 이 예제에서는 질량, 스프링, 댐퍼로 구성된 간단한 기계 시스템을 사용합니다.
다음 2계 미분 방정식은 시스템의 특성을 정의합니다.
이 방정식에서
= 질량.
= 감쇠 계수.
= 스프링 상수.
= 가속도.
= 속도.
= 변위.
= 외부 힘.
에 대한 풀이는 위의 방정식을 Simulink® 모델에 더 명확하게 대응되는 형식으로 제공합니다.
BasicModelingSimpleSystem이라는 모델은 다음 방정식을 나타냅니다.
mdl = "BasicModelingSimpleSystem";
open_system(mdl);
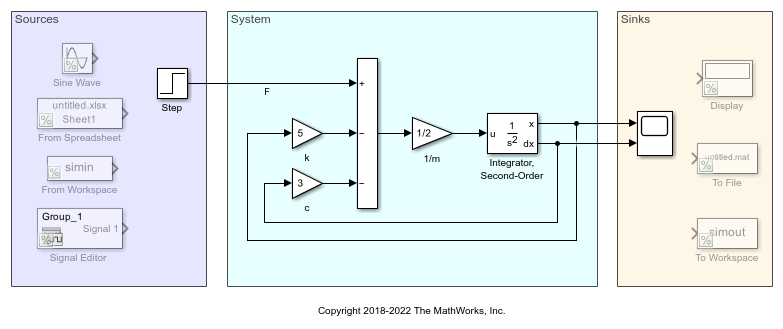
Sum 블록은 질량에 가해진 알짜힘을 계산합니다. 1/m로 레이블이 지정된 Gain 블록은 알짜힘에 을 곱하여 질량의 가속도를 계산합니다. Integrator, Second-Order 블록은 질량의 속도와 위치를 계산합니다.
이 모델은 블록을 다음 세 영역으로 구성합니다.
Sources라는 영역에는 시스템 입력이 포함됩니다.System이라는 영역에는 시스템 또는 플랜트를 나타내는 블록이 포함됩니다.Sinks라는 영역에는 시스템 출력이 포함됩니다.
모델을 미리 정리하여 성장하고 있는 모델에도 적용할 수 있는 모델 구성 요소의 일반적인 프레임워크를 만듭니다.
이 예제는 개발 초기 단계의 모델을 보여주기 때문에 실제 입력 힘은 알 수 없으며 다양한 표준 소스 블록으로 표현될 수 있습니다. 이 모델은 시스템에 입력으로 연결된 Step 블록을 사용합니다. 일부 대체 소스 블록이 표시되어 있지만 이들은 주석 처리되어 있습니다. 예를 들어, From Spreadsheet 블록을 사용하여 사용 가능한 경험적 데이터를 불러올 수 있습니다.
유사하게 여러 싱크 블록이 출력 변위를 받을 수 있습니다. 시뮬레이션 결과가 기대치를 충족하는지 확인하기 위해 이 모델은 Scope 블록을 사용하여 신호를 시각화합니다.
sim(mdl);
