자동차 서스펜션
이 예제에서는 독립식 전륜 및 후륜 수직 서스펜션을 포함하는 단순한 반차량(half-car) 시스템을 모델링하는 방법을 보여줍니다. 이 모델에는 차체의 피치와 바운스 자유도도 포함됩니다. 이 예제는 승차감 특성을 조사하는 데 사용할 수 있는 시뮬레이션 방식을 보여주는 모델을 설명합니다. 이 모델을 파워트레인 시뮬레이션과 함께 사용하면 스로틀 설정의 변동으로 인해 발생하는 종방향의 셔플 현상을 조사할 수 있습니다.
분석 및 물리학
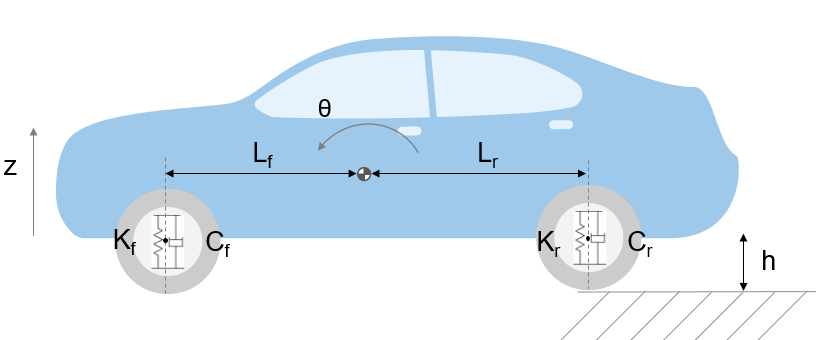
이 그림은 반차량의 모델링된 특성을 보여줍니다. 전륜 및 후륜 서스펜션은 스프링/댐퍼 시스템으로 모델링됩니다. 더 상세한 모델에서는 타이어 모델과, 속도에 종속적인 감쇠(압축 시보다 리바운드 시 더 크게 작용하는 감쇠) 같은 댐퍼 비선형성까지 포함합니다. 차체는 피치와 바운스 자유도를 가지며, 이러한 특성들은 모델에서 4개의 상태, 즉 수직 변위, 수직 속도, 피치 각변위, 피치 각속도로 표현됩니다. 6자유도의 완전한 모델은 벡터 대수 블록을 사용하여 축 변환과 힘, 변위 및 속도 계산을 수행하도록 구현될 수 있습니다.
수식 1은 전륜 서스펜션이 바운스(즉, 수직 자유도)에 미치는 영향을 설명합니다.

여기서







수식 2는 서스펜션으로 인한 피치 모멘트를 설명합니다.



여기서

수식 3은 뉴턴의 제2법칙에 따라 차체 운동의 힘과 모멘트를 해석합니다.


여기서



모델
모델을 엽니다.
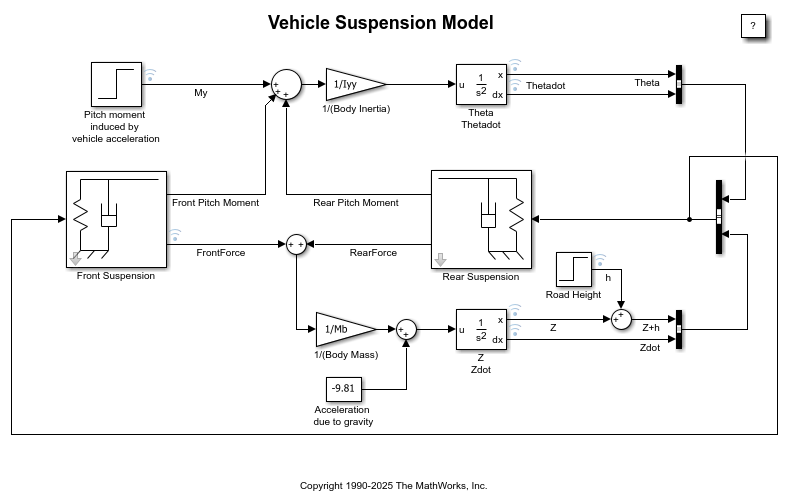
서스펜션 모델에는 두 개의 입력이 있으며, 이에 해당하는 입력 블록 두 개가 모델 다이어그램에서 파란색으로 표시되어 있습니다. 첫 번째 입력은 노면 높이입니다. 여기서 한 계단 입력은 높이에 계단 변동이 있는 노면을 주행하는 차량에 해당합니다. 두 번째 입력은 제동 조작 또는 가속 조작을 했을 때 바퀴 중심을 통과하며 작용하는 수평 힘입니다. 차체의 종방향 운동은 모델링되지 않았기 때문에 이 입력은 피치 축에 대한 모멘트로만 나타납니다.
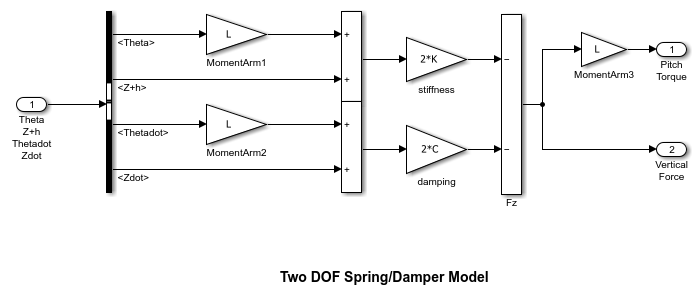
전륜 및 후륜 서스펜션을 모델링하는 스프링/댐퍼 서브시스템이 위에 표시되어 있습니다. Front Suspension 블록 또는 Rear Suspension 블록을 마우스 오른쪽 버튼으로 클릭합니다. 전륜 또는 후륜 서스펜션 서브시스템을 확인하려면 마스크 편집 > 마스크 내부 탐색을 선택하십시오. 서스펜션 서브시스템은 수식 1-3을 모델링합니다. Simulink® 다이어그램은 Gain 블록과 Summation 블록을 사용하여 수식 1-3을 구현합니다.
전륜과 후륜의 차이는 다음과 같이 고려됩니다. 이 서브시스템은 마스크 처리된 블록이므로 각 인스턴스에 대해 다른 데이터 세트(L, K, C)가 입력될 수 있습니다. 또한, L은 카테시안 좌표 x로 간주되어 원점 또는 무게 중심을 기준으로 음수나 양수일 수 있습니다. 따라서, Kf, Cf, -Lf는 Front Suspension 블록에 사용되고 Kr, Cr, Lr은 Rear Suspension 블록에 사용됩니다.
시뮬레이션 실행하기
이 모델을 실행하려면 시뮬레이션 탭에서 실행을 클릭하십시오. sldemo_suspdat.m 파일에서 모델 작업 공간으로 초기 조건을 불러옵니다. 모델 작업 공간의 내용을 확인하려면 Simulink 편집기의 모델링 탭에서 설계 아래 모델 탐색기를 선택하십시오. 모델 탐색기에서, sldemo_suspn 모델의 아래 내용에 있는 "Model Workspace"를 선택합니다. 모델 작업 공간에 초기 조건을 불러오면 의도치 않게 파라미터가 수정되는 것을 방지하고 MATLAB 작업 공간을 정리된 상태로 유지할 수 있습니다.
이 모델은 관련 데이터를 MATLAB 작업 공간에 sldemo_suspn_output이라는 데이터 구조체로 기록합니다. 구조체에 포함된 데이터를 확인하려면 구조체 이름을 입력합니다.
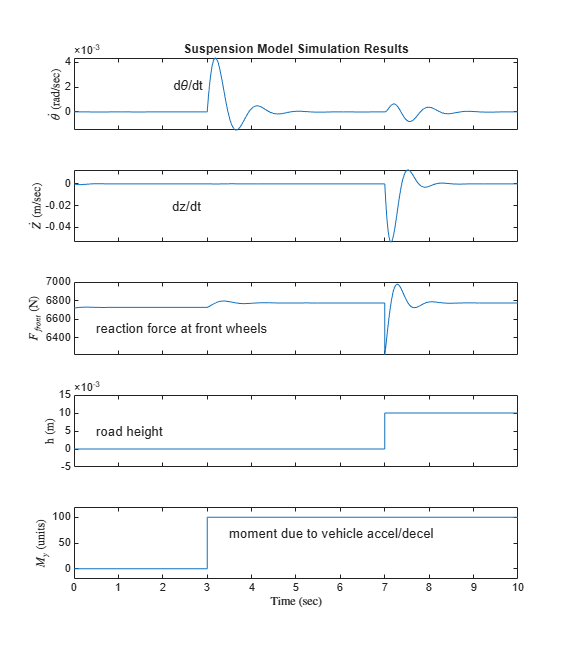
시뮬레이션 결과가 위에 표시되어 있습니다. 결과는 sldemo_suspgraph.m 파일에서 플로팅되었습니다. 디폴트 초기 조건은 테이블 1에서 확인할 수 있습니다.
테이블 1: 디폴트 초기 조건
Lf = 0.9; % front hub displacement from body gravity center (m) Lr = 1.2; % rear hub displacement from body gravity center (m) Mb = 1200; % body mass (kg) Iyy = 2100; % body moment of inertia about y-axis (kg m^2) kf = 28000; % front suspension stiffness (N/m) kr = 21000; % rear suspension stiffness (N/m) cf = 2500; % front suspension damping (N sec/m) cr = 2000; % rear suspension damping (N sec/m)
이 모델은 서스펜션의 감쇠와 강성을 변동시킬 때 미치는 영향을 시뮬레이션할 수 있으며 이를 통해 승차감과 성능 간의 상충 관계를 조사할 수 있습니다. 일반적으로 레이싱카는 높은 감쇠 인자를 갖고 강성이 매우 큰 스프링을 사용하는 반면 일반 승용차는 더 부드러운 스프링을 사용하고 더 큰 진동 반응을 갖습니다.