CAN
CAN 프로토콜을 사용하여 통신
CAN(Controller Area Network)은 여러 기기 간에 통신을 가능하게 하는 견고한 통신 프로토콜입니다. CAN의 기능을 활용하여 견고하고 신뢰할 수 있는 CAN 기반 통신 시스템을 효율적으로 설계하고 구현할 수 있습니다.
블록
| CAN Transmit | Transmit message to CAN network |
| CAN Receive | Receive message from CAN network |
| On-board CAN Receive | Receive messages using on-board Arduino CAN controller (R2024b 이후) |
| On-board CAN Transmit | Transmit messages to CAN network using on-board Arduino CAN controller (R2024b 이후) |
모델 설정
추천 예제

Transmit and Receive Data Using Arduino CAN Blocks
Use Simulink® Support Package for Arduino® Hardware to transmit and receive data from the CAN network using the specified CAN device.
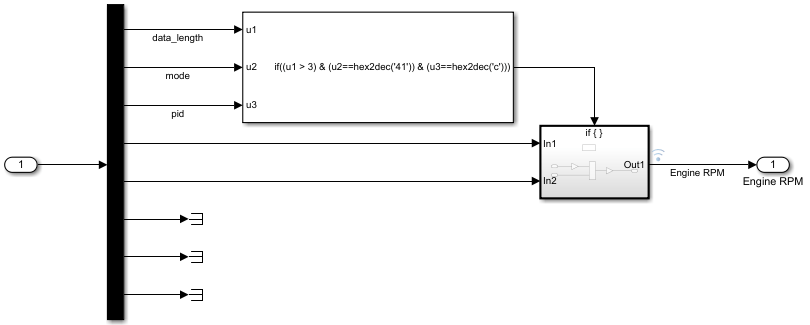
Monitor Engine RPM Using Arduino CAN Blocks
Use Simulink® Support Package for Arduino® Hardware to monitor vehicle engine RPM using Arduino CAN blocks.