Shock Absorber
Spring and damper system that absorbs translational shocks
Libraries:
Simscape /
Driveline /
Couplings & Drives
Description
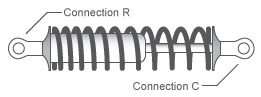
The Shock Absorber block represents a spring-damper system that absorbs vibrations. An internal force acts between ports R and C. This force is the sum of spring stiffness, damping, Coulomb friction, and hard-stop contributions. All force contributions are optional.
The block is a composite of these blocks:
| Block | Function | Library |
|---|---|---|
| Loaded-Contact Translational Friction | Coulomb friction | Simscape / Driveline / Brakes & Detents / Translational |
| Translational Damper | Damping | Simscape / Foundation Library / Mechanical / Translational Elements |
| Translational Spring | Spring | |
| Translational Hard Stop | Hard stop |
Assumptions and Limitations
Setting Hard stop to
Compliant hard stopor setting Coulomb friction force to a nonzero value enhances model fidelity, but reduces simulation speed. For more information, see Driveline Simulation Performance.