모델 동특성 추가하기
동적 힘은 시스템 상태에 종속되며 그에 따라 변화하는 힘입니다. 모델에 동적 힘, 즉 동특성을 포함하면 충실도가 향상되지만, 반면 모델 복잡도도 증가합니다. Simscape™ Driveline™에서는 일부 블록의 파라미터화에 관성과 같은 동특성을 추가할 수 있으며, 또는 동특성을 개별적으로 캡처하기 위해 블록을 추가할 수도 있습니다. 모델 설계 시 동적 힘을 제외한 상태에서 시작하여, 모델의 충실도를 높여가면서 동특성을 점진적으로 추가하십시오.
이 예제에서는 단순한 회전 기계 모델에 관성을 추가하는 방법을 보여줍니다. 다음을 입력하여 단순한 회전 기계 시스템 모델을 엽니다.
openExample('sdl/SimpleRotationalMechanicalSystemExample')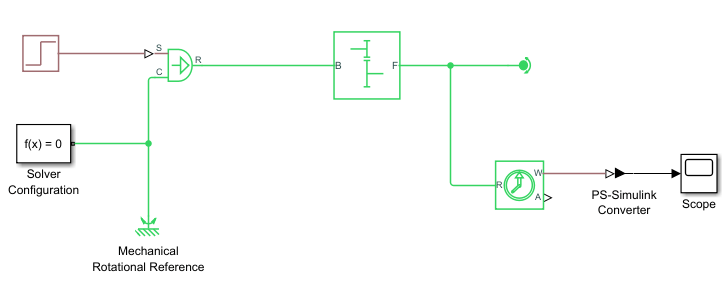
이 모델은 Ideal Angular Velocity Source 블록을 사용하여 DC 모터와 같은 구동 컴포넌트를 나타냅니다.
백래시를 시뮬레이션하는 것은 모델 동특성의 한 예입니다. 백래시는 맞물린 기어가 회전하기 시작하거나 방향을 바꿀 때 발생합니다. 맞물린 톱니 사이의 간극은 톱니가 서로 접촉할 때 빠른 진동을 유발합니다.
백래시를 추가하려면 먼저 시스템에 관성을 추가해야 합니다. Simple Gear 블록과 Rotational Free End 블록 사이에 Inertia 블록을 배치합니다.
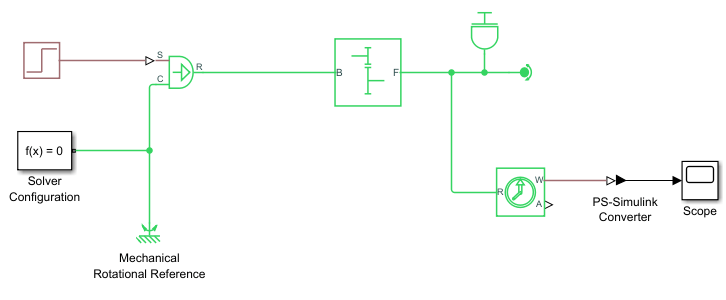
디폴트 관성은 0.01 kg*m^2입니다. Simple Gear 블록을 더블 클릭하고 백래시 탭에서 백래시 활성화를 선택합니다. 이 파라미터를 선택하면 백래시의 효과를 제어하는 관련 파라미터가 활성화됩니다. 백래시가 Simple Gear 블록의 출력 속도에 미치는 영향을 분석하기 위해 Scope 블록을 열고 모델을 실행합니다.
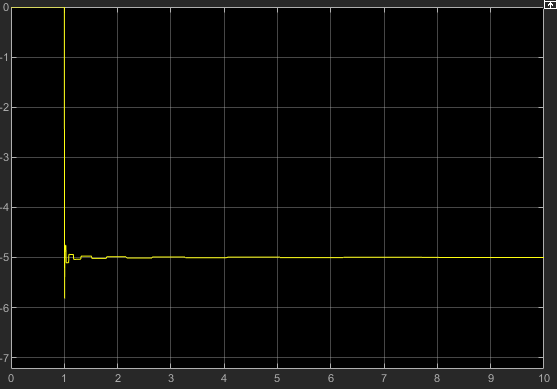
시스템 시작 시에는 백래시 응답이 비교적 작으며, 시스템의 관성이 작기 때문에 최소한의 진동만 있습니다. 관성을 추가하면 시스템이 더 강성(stiff)해지고 더 높은 주파수 진동을 가지게 되므로 계산 비용이 증가합니다.
하드 스톱 또는 클러치를 나타내는 블록은 Simscape Driveline 모델에 빠른 동특성과 수치적 강성을 유발할 수 있습니다. 모델의 강성을 실험하기 위해, Inertia 블록의 관성 파라미터를 1 kg*m^2로 설정하고 시뮬레이션을 다시 실행합니다.
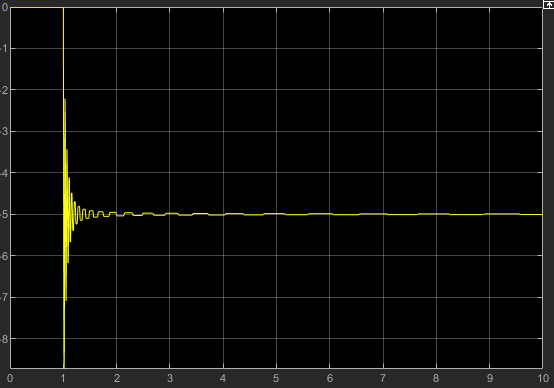
시스템의 강성이 증가하면 더 높은 주파수의 진동이 발생하므로 솔버는 더 작은 스텝 크기를 필요로 합니다. 시스템의 강성을 줄이려면 감쇠를 추가합니다.