GPS와 그 작동 방식
이 항목에서는 위성 측위 시스템(GPS), GPS의 세그먼트 구조, GPS가 제공하는 정확도에 대한 기본적인 내용을 설명합니다. 또한 삼변측량 기법이 GPS와 기타 범지구 위성 항법 시스템(GNSS) 신호의 동작 기반이 되는 이유에 대해서도 자세히 설명합니다.
GPS는 항법 신호를 송출하는 위성군과, 이 위성들을 모니터링하고 제어하기 위한 지상국 및 위성 관제소 네트워크로 구성된 우주 기반 무선통신 항법 인프라입니다. 현재까지 여러 개의 GPS 항법 위성이 발사되었으며, 이러한 위성은 일반적으로 블록으로 분류됩니다. 여러 개의 위성을 포함하는 여러 개의 위성 블록이 있습니다. 2023년 말까지 발사된 블록에는 블록 Ⅰ, Ⅱ, ⅡA, ⅡR, ⅡRM, ⅡF, Ⅲ, ⅢF가 포함됩니다. 이러한 블록에는 서로 다른 기능을 가진 다양한 세대의 GPS 위성이 포함되어 있습니다.
31개의 GPS 위성이 24개 슬롯으로 구성된 위성군에 속해 있으며, 약 20,200km 고도에서 지구를 둘러싼 6개의 궤도면 중 하나에 전략적으로 배치되어 있습니다. 24개 슬롯 구성 덕분에 지구 표면의 어느 위치에서든 최소 4개의 위성이 가시선에 들어오게 됩니다. 나머지 위성은 주요 위성이 정비를 받거나 서비스 중단 상태에 있는 동안 지속적인 커버리지와 운용 무결성을 유지하고 GPS의 전반적인 성능을 향상시킵니다. 원래 미국 국방부에서 군사용으로 개발한 GPS는 민간용으로 확장되어, 1993년에는 완전운용능력(full operational capability)을 달성하였습니다.
다음은 GPS 신호의 필수 요소를 요약한 것입니다.
GPS 위성은 민간용으로 L1(1575.42MHz), L2(1227.60MHz), L5(1176.45MHz)의 서로 다른 세 가지 주파수를 사용합니다.
위성 네트워크는 코드 분할 다중 접속(CDMA) 확산 스펙트럼 방법을 사용합니다. 이 방법에서는 낮은 비트 레이트로 송신되는 메시지 데이터가 높은 레이트의 의사 난수(PRN) 시퀀스로 인코딩되어 각 위성에 대한 고유한 PRN ID를 이루게 됩니다.
GPS는 레거시 L1 대역의 C/A(coarse acquisition) 코드와 P(precision) 코드, L1 대역의 L1C(modernized L1 civil) 코드, L2C 대역의 CM(civil-moderate) 코드와 CL(civil-long) 코드, 그리고 L5 대역의 I5 코드(in-phase code)와 Q5 코드(quadrature-phase code)라는 서로 다른 다섯 가지 민간 신호를 사용합니다.
이러한 GPS 신호와 내비게이션 데이터를 이해하려면 GPS 신호 항목을 참조하십시오.
아래 표에서는 각 GPS 대역이 사용하는 주파수를 설명합니다.
| 대역 | 주파수 | 설명 |
|---|---|---|
| L1 | 1575.42MHz | C/A, P, L1 민간(L1C), 군용(M) 코드 |
| L2 | 1227.60MHz | P, L2C, M 코드 |
| L3 | 1381.05MHz | 핵폭발 검출에 사용 |
| L4 | 1379.91MHz | 전리층 보정을 위한 연구 |
| L5 | 1176.45MHz | 민간 인명 안전(SoL: safety-of-life)에 중요한 응용 분야 지원 |
GPS 세그먼트
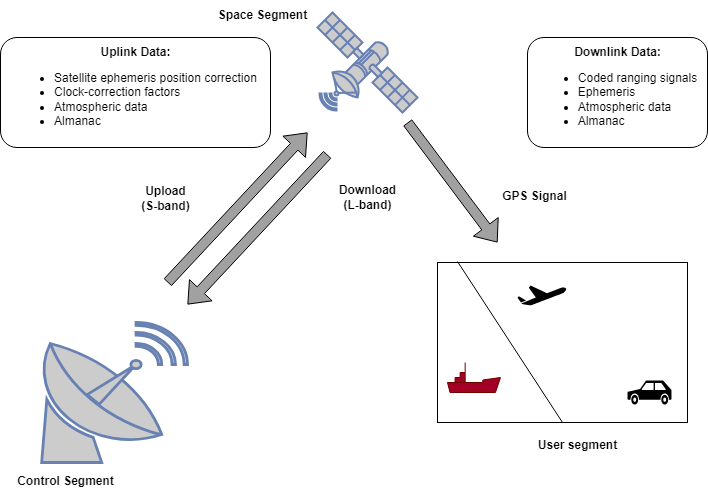
GPS는 제어 세그먼트, 우주 세그먼트, 사용자 세그먼트의 세 가지 세그먼트로 구성됩니다. 이들은 함께 위치 정보를 제공합니다.
제어 세그먼트 — 제어 세그먼트는 추적국, 마스터 관제소, 지상 안테나의 네트워크로 구성됩니다. 운용 책임의 범위에는 GPS 위성의 위치 확인과 예측, 시스템 무결성 평가, 탑재된 원자 시계의 성능 평가, 대기 데이터 수집, 위성 almanac 업데이트, 추가적인 관련 요인 해결을 위한 GPS 위성 모니터링이 포함됩니다. 그런 다음, 제어 세그먼트는 이 데이터를 모아 S 대역 링크를 사용하여 GPS 위성에 송신합니다. 모니터링 시설은 북미와 남미, 아프리카, 유럽, 아시아, 호주에 걸쳐 전 세계에 전략적으로 배치되어 있습니다.
우주 세그먼트 — 우주 세그먼트는 지구 주변 궤도의 위성들로 구성되며, 이들은 사용자에게 지리적 위치 및 시간 데이터를 제공하는 신호를 송신합니다. 이러한 위성의 주요 기능에는 제어 세그먼트에서 제공하는 데이터의 수신과 저장이 포함됩니다. 이러한 위성은 탑재된 원자 시계를 사용하여 정확한 시간을 유지하고 세 개의 L 대역 주파수(L1, L2, L5)를 통해 사용자에게 정보와 신호를 전파합니다.
사용자 세그먼트 — 사용자 세그먼트에는 손목시계나 휴대폰 같은 GPS 수신 기능이 탑재된 장치가 포함됩니다. 이러한 GPS 수신기는 위성의 신호를 위치, 속도, 시간 데이터의 정밀한 추정값으로 변환하도록 설계되었습니다.
GPS 작동 방식
GPS 동작은 위성군을 정확한 기준점으로 활용하는 거리 측정과 삼변측량의 원리를 기반으로 합니다.
GPS와 기타 GNSS 신호는 둘 다 수신기 위치를 확인하기 위해 거리 측정과 삼변측량의 원리를 동일하게 따릅니다.
GPS 수신기를 처음 켜면 가시 위성으로부터 궤도 정보(ephemeris)를 다운로드하며, 이 과정에는 최대 1분이 걸릴 수 있습니다. 그러나 모든 위성의 궤도 정보(almanac)를 다운로드하는 데는 12.5분이 걸립니다. 지구상 어디서든 수신기 위치를 확인하려면 최소 4개의 위성에서 방출되는 신호의 조합이 있어야 합니다. GPS 위성에는 매우 정확한 시간을 제공하는 원자 시계가 있습니다. 위성 신호에는 시간 정보가 포함되어 있어 수신기가 신호가 송출된 시간을 지속적으로 확인할 수 있습니다. 수신기는 이 신호 데이터와 신호 수신 시간과 송출 시간 사이의 시간차를 사용하여 위성으로부터의 거리를 계산합니다.
각 위성은 다음 정보를 포함하는 내비게이션 메시지를 지속적으로 송출합니다.
ephemeris — 참조 시간에 개별 위성의 위치에 대한 세부 정보를 제공합니다. 위성은 궤도 전파기를 사용하여 신호 송신의 모든 시점에서 위성의 위치를 확인합니다.
시간 — 위성에 탑재된 원자 시계에서 가져온 GPS 시스템 시간입니다.
almanac — 전체 위성군에 속한 각 위성이 갖는 대략적인 궤도 정보와 궤도 데이터를 포함합니다.
GPS 수신기는 이러한 송신을 포착하고 정확한 도착 시간을 사용해 수신된 코드를 참조 코드와 일치시켜 궤도를 도는 위성과 장치 간의 공간적 거리를 확인합니다. 다음 일반 방정식은 송신기와 수신기 간의 거리를 계산합니다.
Distance = Speed of light × (time at which signal is received – time at which signal was transmitted)
2차원 평면에서의 수신기 위치
GPS 수신기는 삼변측량을 활용해 위성에서 제공하는 위치 데이터와 계산된 의사 거리를 함께 사용하여 위치를 정확히 확인합니다. 삼변측량을 이해하기 위해 먼저 2차원 평면에서의 위치 고정을 살펴보겠습니다.
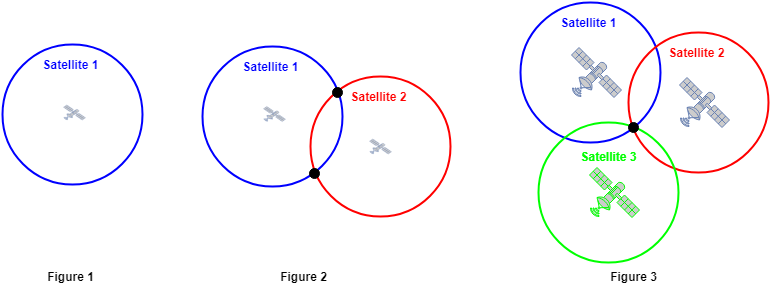
위성에서 수신기까지의 거리는 위성과 수신기 간의 거리를 반지름으로 하는 원을 형성하는 지구상의 여러 위치를 가리키게 됩니다. 그 결과, 그림 1처럼 수신기의 위치는 이 원의 원주 어디에든 있을 수 있습니다.
위성군에 속하는 두 위성에서 수신기까지의 거리를 활용하면 수신기의 가능한 위치는 두 원의 원호가 교차하는 지점으로 좁혀져 그림 2처럼 두 개의 교차점이 생깁니다.
세 번째 위성에 대한 수신기의 거리는 그림 3처럼 수신기 좌표를 정확하게 식별하여 모호성을 제거하고 X-Y 평면에서의 정확한 위치를 제공하는 데 도움이 됩니다. 이 과정은 2차원 고정이나 2차원 삼변측량이라고도 합니다. 교차점이 모두 2차원 평면에 위치하기 때문입니다. 고도가 추가되면 3차원 삼변측량이 적용됩니다.
3차원 평면에서의 수신기 위치
현실 세계는 3차원 공간이므로 GPS 수신기의 3차원 위치, 즉 위도, 경도, 고도가 필요합니다.
3차원에서 각 위성은 원이 아니라 구의 중심에 있습니다.
위성이 두 개인 경우 수신기의 위치를 각각 수신기로부터 위성 1과 2까지의 거리를 나타내는 반지름이 R1과 R2인 두 구의 교차점으로 형성되는 원으로 제한할 수 있습니다.
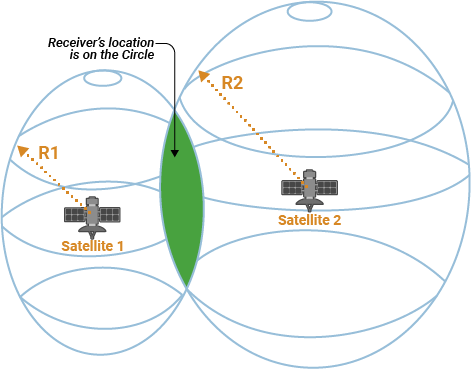
세 번째 위성을 추가하면 GPS 수신기의 위치를 세 개의 구의 교차점, 즉 두 점으로 좁힐 수 있습니다.
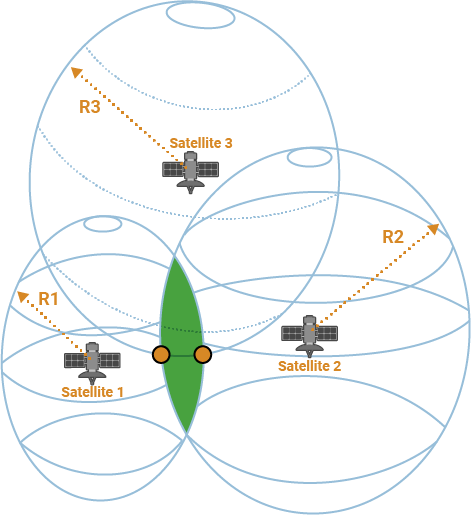
이 점들 중 하나는 GPS 수신기의 위치가 되기에는 공간적으로 너무 멀리 떨어져 있으므로 사실상 가능하지 않습니다. 따라서 수신기로부터 이 세 위성까지의 거리와 신호가 송신되었을 때의 위성 위치에 대한 정보는 수신기 위치를 3차원(위도, 경도, 고도)으로 확인하기에 충분합니다. 이 세 위성 신호의 거리를 계산하려면 GPS와 동기화된 원자 시계를 사용해야 하지만, GPS 수신기의 원자 시계는 실용적이지 않으므로 수신기 시간 편향은 수신기의 위치 추정에 필요한 요소로 여전히 남아 있습니다. 하지만 네 번째 위성에서 측정을 수행함으로써 수신기는 이 원자 시계 요구 사항을 피할 수 있습니다. 따라서 4개의 위성을 사용하면 수신기는 위도, 경도, 고도, 정확한 수신기 시간을 계산할 수 있습니다.
GPS 정확도
위성의 위치 정밀도를 위해 GPS 제어 세그먼트는 각 위성의 정밀한 공간 좌표(ephemeris)와 시간 측정 파라미터를 지속적으로 감시하여 시스템 정확도의 무결성을 유지합니다. ephemeris 데이터의 정확도는 2m 이내이며, 그보다 더 정확할 때도 많습니다. GPS 탑재 스마트폰의 정확도는 일반적으로 4.9m(16ft) 이내이며, 이중 주파수 수신기와 증강 시스템을 사용하면 센티미터 수준까지 향상시킬 수 있습니다. GPS의 정확도는 GPS 수신기의 유형, 환경, 위성 신호의 품질, 현재 하늘의 위성 지오메트리 등 여러 요인에 따라 달라집니다.