Simulating a Bistatic Radar with Two Targets
This example shows how to simulate a bistatic radar system with two targets. The transmitter and the receiver of a bistatic radar are not co-located and move along different paths.
Exploring the Example
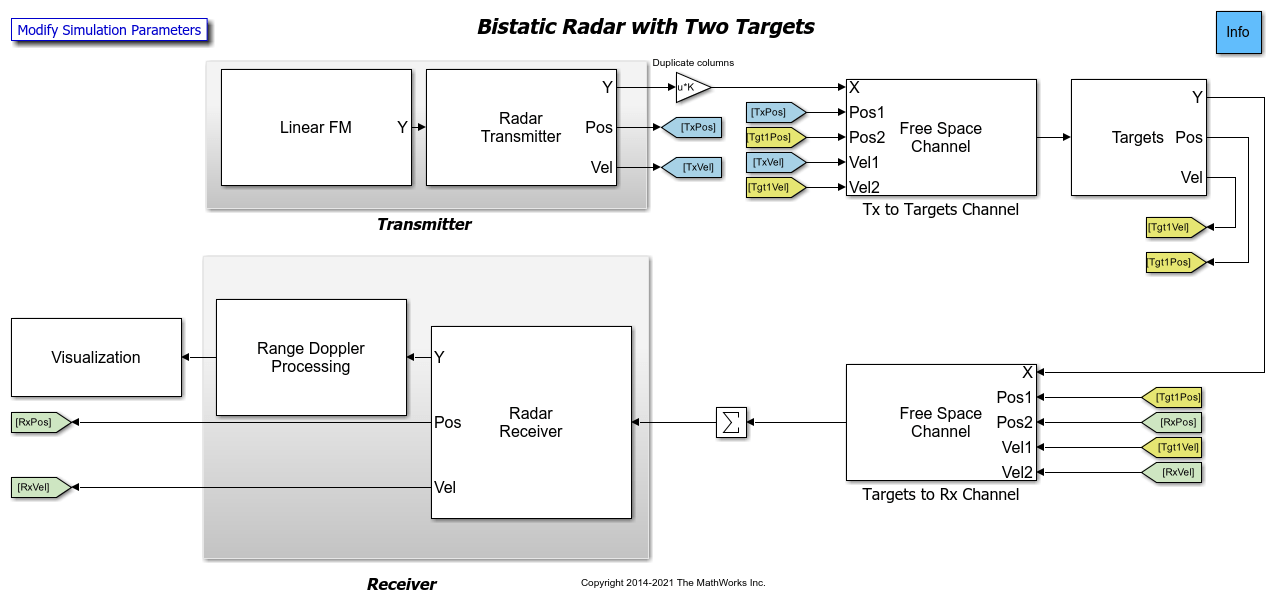
The following model shows an end-to-end simulation of a bistatic radar system. The system is divided into three parts: the transmitter subsystem, the receiver subsystem, and the targets and their propagation channels. The model shows the signal flowing from the transmitter, through the channels to the targets and reflected back to the receiver. Range-Doppler processing is then performed at the receiver to generate the range-Doppler map of the received echoes.
Transmitter
Linear FM- Creates linear FM pulse as the transmitter waveform. The signal sweeps a 3 MHz bandwidth, corresponding to a 50-meter range resolution.Radar Transmitter- Amplifies the pulse and simulates the transmitter motion. In this case, the transmitter is mounted on a stationary platform located at the origin. The operating frequency of the transmitter is 300 MHz.

Targets
This example includes two targets with similar configurations. The targets are mounted on the moving platforms.
Tx to Targets Channel- Propagates signal from the transmitter to the targets. The signal inputs and outputs of the channel block have two columns, one column for the propagation path to each target.Targets to Rx Channel- Propagates signal from the targets to the receiver. The signal inputs and outputs of the channel block have two columns, one column for the propagation path from each target.Targets- Reflects the incident signal and simulates both targets motion. This first target with an RCS of 2.5 square meters is approximately 15 km from the transmitter and is moving at a speed of 141 m/s. The second target with an RCS of 4 square meters is approximately 35 km from the transmitter and is moving at a speed of 168 m/s. The RCS of both targets are specified as a vector of two elements in the Mean radar cross section parameter of the underlying Target block.

Receiver
Radar Receiver- Receives the target echo, adds receiver noise, and simulates the receiver motion. The distance between the transmitter and the receiver is 20 km, and the receiver is moving at a speed of 20 m/s. The distance between the receiver and the two targets are approximately 5 km and 15 km, respectively.

Range-Doppler Processing- Computes the range-Doppler map of the received signal. The received signal is buffered to form a 64-pulse burst which is then passed to a range-Doppler processor. The processor performs a matched filter operation along the range dimension and an FFT along the Doppler dimension.

Exploring the Model
Several dialog parameters of the model are calculated by the helper function helperslexBistaticParam. To open the function from the model, click on Modify Simulation Parameters block. This function is executed once when the model is loaded. It exports to the workspace a structure whose fields are referenced by the dialogs. To modify any parameters, either change the values in the structure at the command prompt or edit the helper function and rerun it to update the parameter structure.
Results and Displays
The figure below shows the two targets in the range-Doppler map, range-time intensity plot and Doppler-time intensity plot.

Because this is a bistatic radar, the range-Doppler map above actually shows the target range as the arithmetic mean of the distances from the transmitter to the target and from the target to the receiver. Therefore, the expected range of the first target is approximately 10 km, ((15+5)/2) and for second target approximately 25 km, ((35+15)/2). The range-Doppler map shows these two values as the measured values.
Similarly, the Doppler shift of a target in a bistatic configuration is the sum of the target's Doppler shifts relative to the transmitter and the receiver. The relative speeds to the transmitter are -106.4 m/s for the first target and 161.3 m/s for the second target while the relative speeds to the receiver are 99.7 m/s for the first target and 158.6 m/s for second target. Thus, the range-Doppler map shows the overall relative speeds as -6.7 m/s (-24 km/h) and 319.9 m/s (1152 km/h) for the first target and the second target, respectively, which agree with the expected sum values.
The Range-Time Intensity scope and Doppler-Time Intensity scope shows the scrolling range and Doppler response intensities over time which matches the measured values range and speed values.


Summary
This example shows an end-to-end bistatic radar system simulation with two targets. It explains how to analyze the target return by plotting a range-Doppler map.