sensorsig
Simulate received signal at sensor array
Syntax
Description
x = sensorsig(pos,ns,ang)pos represents
the positions of the array elements, each of which is assumed to be
isotropic. ns indicates the number of snapshots
of the simulated signal. ang represents the incoming
directions of each plane wave signal. The plane wave signals are assumed
to be constant-modulus signals with random phases.
Examples
Simulate the received signal at an array, and use the data to estimate the arrival directions.
Create an 8-element uniform linear array whose elements are spaced half a wavelength apart.
fc = 3e8; c = 3e8; lambda = c/fc; array = phased.ULA(8,lambda/2);
Simulate 100 snapshots of the received signal at the array. Assume there are two signals, coming from azimuth 30° and 60°, respectively. The noise is white across all array elements, and the SNR is 10 dB.
x = sensorsig(getElementPosition(array)/lambda,...
100,[30 60],db2pow(-10));Use a beamscan spatial spectrum estimator to estimate the arrival directions, based on the simulated data.
estimator = phased.BeamscanEstimator('SensorArray',array,... 'PropagationSpeed',c,'OperatingFrequency',fc,... 'DOAOutputPort',true,'NumSignals',2); [~,ang_est] = estimator(x);
Plot the spatial spectrum resulting from the estimation process.
plotSpectrum(estimator)
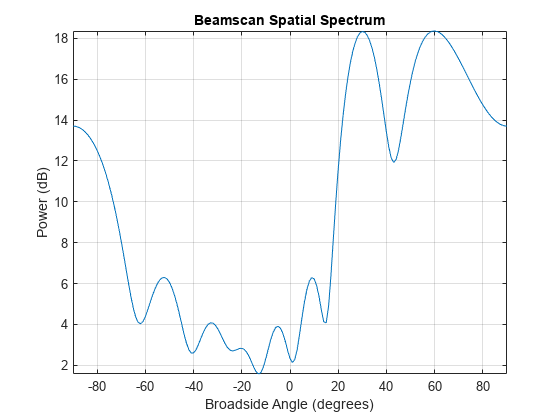
The plot shows peaks at 30° and 60°.
Simulate receiving two uncorrelated incoming signals that have different power levels. A vector named scov stores the power levels.
Create an 8-element uniform linear array whose elements are spaced half a wavelength apart.
fc = 3e8; c = 3e8; lambda = c/fc; ha = phased.ULA(8,lambda/2);
Simulate 100 snapshots of the received signal at the array. Assume that one incoming signal originates from 30 degrees azimuth and has a power of 3 W. A second incoming signal originates from 60 degrees azimuth and has a power of 1 W. The two signals are not correlated with each other. The noise is white across all array elements, and the SNR is 10 dB.
ang = [30 60];
scov = [3 1];
x = sensorsig(getElementPosition(ha)/lambda,...
100,ang,db2pow(-10),scov);Use a beamscan spatial spectrum estimator to estimate the arrival directions, based on the simulated data.
hdoa = phased.BeamscanEstimator('SensorArray',ha,... 'PropagationSpeed',c,'OperatingFrequency',fc,... 'DOAOutputPort',true,'NumSignals',2); [~,ang_est] = step(hdoa,x);
Plot the spatial spectrum resulting from the estimation process.
plotSpectrum(hdoa);
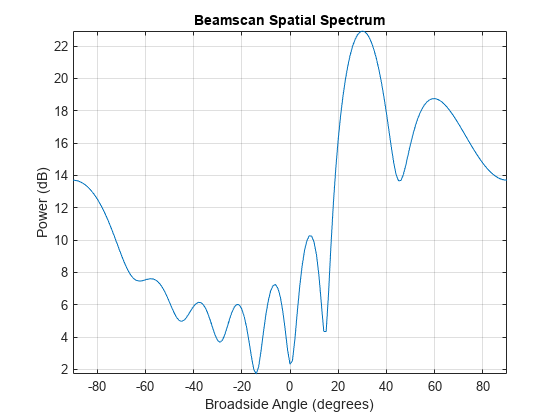
The plot shows a high peak at 30 degrees and a lower peak at 60 degrees.
Simulate the reception of three signals, two of which are correlated.
Create a signal covariance matrix in which the first and third of three signals are correlated with each other.
scov = [1 0 0.6;... 0 2 0;... 0.6 0 1];
Simulate receiving 100 snapshots of three incoming signals from 30°, 40°, and 60° azimuth, respectively. The array that receives the signals is an 8-element uniform linear array whose elements are spaced one-half wavelength apart. The noise is white across all array elements, and the SNR is 10 dB.
pos = (0:7)*0.5; ns = 100; ang = [30 40 60]; ncov = db2pow(-10); x = sensorsig(pos,ns,ang,ncov,scov);
Simulate receiving a signal at a URA. Compare the signal theoretical covariance with its sample covariance.
Create a 2-by-2 uniform rectangular array having elements spaced 1/4-wavelength apart.
pos = 0.25 * [0 0 0 0; -1 1 -1 1; -1 -1 1 1];
Define the noise power independently for each of the four array elements. Each entry in ncov is the noise power of an array element. This element position is the corresponding column in pos. Assume the noise is uncorrelated across elements.
ncov = db2pow([-9 -10 -10 -11]);
Simulate 100 snapshots of the received signal at the array, and store the theoretical and empirical covariance matrices. Assume that one incoming signal originates from 30° azimuth and 10° elevation. A second incoming signal originates from 50° azimuth and 0° elevation. The signals have a power of 1 W and are uncorrelated.
ns = 100;
ang1 = [30; 10];
ang2 = [50; 0];
ang = [ang1, ang2];
rng default
[x,rt,r] = sensorsig(pos,ns,ang,ncov);View the magnitudes of the theoretical covariance and sample covariance.
abs(rt)
ans = 4×4
2.1259 1.8181 1.9261 1.9754
1.8181 2.1000 1.5263 1.9261
1.9261 1.5263 2.1000 1.8181
1.9754 1.9261 1.8181 2.0794
abs(r)
ans = 4×4
2.2107 1.7961 2.0205 1.9813
1.7961 1.9858 1.5163 1.8384
2.0205 1.5163 2.1762 1.8072
1.9813 1.8384 1.8072 2.0000
Simulate receiving a signal at a ULA, where the noise between different sensors is correlated.
Create a 4-element uniform linear array whose elements are spaced one-half wavelength apart.
pos = 0.5 * (0:3);
Define the noise covariance matrix. The value in the ( k,_j_) position in the ncov matrix is the covariance between the k and j array elements listed in array.
ncov = 0.1 * [1 0.1 0 0; 0.1 1 0.1 0; 0 0.1 1 0.1; 0 0 0.1 1];
Simulate 100 snapshots of the received signal at the array. Assume that one incoming signal originates from 60° azimuth.
ns = 100; ang = 60; [x,rt,r] = sensorsig(pos,ns,ang,ncov);
View the theoretical and sample covariance matrices for the received signal.
rt,r
rt = 4×4 complex
1.1000 + 0.0000i -0.9027 - 0.4086i 0.6661 + 0.7458i -0.3033 - 0.9529i
-0.9027 + 0.4086i 1.1000 + 0.0000i -0.9027 - 0.4086i 0.6661 + 0.7458i
0.6661 - 0.7458i -0.9027 + 0.4086i 1.1000 + 0.0000i -0.9027 - 0.4086i
-0.3033 + 0.9529i 0.6661 - 0.7458i -0.9027 + 0.4086i 1.1000 + 0.0000i
r = 4×4 complex
1.1059 + 0.0000i -0.8681 - 0.4116i 0.6550 + 0.7017i -0.3151 - 0.9363i
-0.8681 + 0.4116i 1.0037 + 0.0000i -0.8458 - 0.3456i 0.6578 + 0.6750i
0.6550 - 0.7017i -0.8458 + 0.3456i 1.0260 + 0.0000i -0.8775 - 0.3753i
-0.3151 + 0.9363i 0.6578 - 0.6750i -0.8775 + 0.3753i 1.0606 + 0.0000i
Input Arguments
Output Arguments
More About
The azimuth angle of a vector is the angle between the x-axis and the orthogonal projection of the vector onto the xy plane. The angle is positive in going from the x axis toward the y axis. Azimuth angles lie between –180 and 180 degrees. The elevation angle is the angle between the vector and its orthogonal projection onto the xy-plane. The angle is positive when going toward the positive z-axis from the xy plane. By default, the boresight direction of an element or array is aligned with the positive x-axis. The boresight direction is the direction of the main lobe of an element or array.
Note
The elevation angle is sometimes defined in the literature as the angle a vector makes with the positive z-axis. The MATLAB® and Phased Array System Toolbox™ products do not use this definition.
This figure illustrates the azimuth angle and elevation angle for a vector shown as a green solid line.

Extended Capabilities
Version History
Introduced in R2012b