phased.LCMVBeamformer
Narrowband LCMV beamformer
Description
The phased.LCMVBeamformer object implements a narrowband linear-constraint minimum-variance (LCMV) beamformer for a sensor array. The LCMV beamformer belongs to the family of constrained optimization beamformers.
To beamform signals arriving at a sensor array:
Create the
phased.LCMVBeamformerobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
beamformer = phased.LCMVBeamformerbeamformer, with default property values.
beamformer = phased.LCMVBeamformer(Name,Value)Name set to a specified
Value. You can specify additional name-value pair arguments in any
order as
(Name1,Value1,...,NameN,ValueN).
Enclose each property name in single quotes.
Example: beamformer = phased.LCMVBeamformer('Constraint',[1;1]) sets
the constraint matrix.
Properties
Usage
Description
Y = beamformer(X,XT)XT as training data to calculate the beamforming weights. To use
this syntax, set the TrainingInputPort property to true.
[
returns the beamforming weights Y,W] = beamformer(___)W. To use this syntax, set the
WeightsOutputPort property to true.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
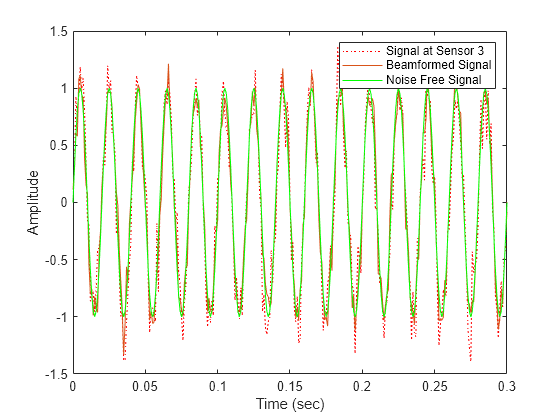
Apply an LCMV beamformer to a 5-element ULA of isotropic sensor elements, preserving the signal from a desired direction. The operating frequency is 300 MHz.
Simulate a low-frequency sinusoid signal in Gaussian noise.
f = 50; t = (0:.001:.3)'; x = sin(2*pi*f*t); c = physconst('LightSpeed'); fc = 300e6; lambda = c/fc; incidentAngle = [45;0]; antenna = phased.IsotropicAntennaElement('FrequencyRange',[20 20e8]); array = phased.ULA('NumElements',5,'ElementSpacing',lambda/2,... 'Element',antenna); x = collectPlaneWave(array,x,incidentAngle,fc,c); noise = 0.2*(randn(size(x)) + 1j*randn(size(x))); rx = x + noise;
Beamform the array.
steervec = phased.SteeringVector('SensorArray',array,... 'PropagationSpeed',c); beamformer = phased.LCMVBeamformer('Constraint',steervec(fc,incidentAngle),'DesiredResponse',1); y = beamformer(rx);
Plot the original and beamformed signals.
plot(t,real(rx(:,3)),'r:',t,real(y),t,real(x(:,3)),'g') xlabel('Time (sec)') ylabel('Amplitude') legend('Signal at Sensor 3','Beamformed Signal','Noise Free Signal')
This example shows how to use an LCMV beamformer to point a null of the array response in the direction of an interfering source. The array is a 10-element uniform linear array (ULA). By default, the ULA elements are isotropic antennas created by the phased.IsotropicAntennaElement System object™. Set the frequency range of the antenna elements so that the carrier frequency lies within the operating range. The carrier frequency is 1 GHz.
fc = 1e9; lambda = physconst('LightSpeed')/fc; array = phased.ULA('NumElements',10,'ElementSpacing',lambda/2); array.Element.FrequencyRange = [8e8 1.2e9];
Simulate a test signal using a simple rectangular pulse.
t = linspace(0,0.3,300)'; testsig = zeros(size(t)); testsig(201:205) = 1;
Assume the rectangular pulse is incident on the ULA from an angle of 30° azimuth and 0° elevation. Use the collectPlaneWave function of the ULA System object to simulate reception of the pulse waveform from the incident angle.
angle_of_arrival = [30;0]; x = collectPlaneWave(array,testsig,angle_of_arrival,fc);
The signal x is a matrix with ten columns. Each column represents the received signal at one of the array elements.
Construct a conventional phase-shift beamformer. Set the WeightsOutputPort property to true to output the spatial filter weights.
convbeamformer = phased.PhaseShiftBeamformer('SensorArray',array,... 'OperatingFrequency',1e9,'Direction',angle_of_arrival,... 'WeightsOutputPort',true);
Add complex-valued white Gaussian noise to the signal x. Set the default random number stream for reproducible results.
rng default
npower = 0.5;
x = x + sqrt(npower/2)*(randn(size(x)) + 1i*randn(size(x)));Create a 10W interference source. Specify the barrage jammer to have an effective radiated power of 10 W. The interference signal from the barrage jammer is incident on the ULA from an angle of 120° azimuth and 0° elevation. Use the collectPlaneWave function of the ULA System object to simulate reception of the jammer signal.
jamsig = sqrt(10)*randn(300,1); jammer_angle = [120;0]; jamsig = collectPlaneWave(array,jamsig,jammer_angle,fc);
Add complex-valued white Gaussian noise to simulate noise contributions not directly associated with the jamming signal. Again, set the default random number stream for reproducible results. This noise power is 0 dB below the jammer power. Beamform the signal using a conventional beamformer.
noisePwr = 1e-5;
rng(2008);
noise = sqrt(noisePwr/2)*...
(randn(size(jamsig)) + 1j*randn(size(jamsig)));
jamsig = jamsig + noise;
rxsig = x + jamsig;
[yout,w] = convbeamformer(rxsig);Implement the adaptive LCMV beamformer using the same ULA array. Use the target-free data, jamsig, as training data. Output the beamformed signal and the beamformer weights.
steeringvector = phased.SteeringVector('SensorArray',array,... 'PropagationSpeed',physconst('LightSpeed')); LCMVbeamformer = phased.LCMVBeamformer('DesiredResponse',1,... 'TrainingInputPort',true,'WeightsOutputPort',true); LCMVbeamformer.Constraint = steeringvector(fc,angle_of_arrival); LCMVbeamformer.DesiredResponse = 1; [yLCMV,wLCMV] = LCMVbeamformer(rxsig,jamsig);
Plot the conventional beamformer output and the adaptive beamformer output.
subplot(211) plot(t,abs(yout)) axis tight title('Conventional Beamformer') ylabel('Magnitude') subplot(212) plot(t,abs(yLCMV)) axis tight title('LCMV (Adaptive) Beamformer') xlabel('Seconds') ylabel('Magnitude')

The adaptive beamformer significantly improves the SNR of the rectangular pulse at 0.2 s.
Using conventional and LCMV weights, plot the responses for each beamformer.
subplot(211) pattern(array,fc,[-180:180],0,'PropagationSpeed',physconst('LightSpeed'),... 'CoordinateSystem','rectangular','Type','powerdb','Normalize',true,... 'Weights',w) title('Array Response with Conventional Beamforming Weights'); subplot(212) pattern(array,fc,[-180:180],0,'PropagationSpeed',physconst('LightSpeed'),...) 'CoordinateSystem','rectangular','Type','powerdb','Normalize',true,... 'Weights',wLCMV) title('Array Response with LCMV Beamforming Weights');

The adaptive beamform places a null at the arrival angle of the interference signal, 120°.
Algorithms
References
[1] Van Trees, H. Optimum Array Processing. New York: Wiley-Interscience, 2002.
Extended Capabilities
Version History
Introduced in R2011a