arrayfactor
Description
af = arrayfactor(pos,ang)af for an array of elements located at
positions pos and arrival directions ang. See
Element and Array Radiation and Response Patterns
for a discussion of array factors and array responses.
Examples
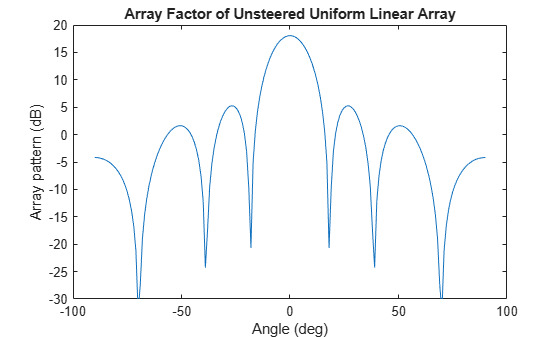
Compute the array factor for an unsteered 8-element ULA operating at 100 MHz. Elements are placed 0.4 wavelengths apart.
freq = 100e6; c = physconst('LightSpeed'); lam = c/freq; pos = (0:7)*0.4; ang = -90:90; af = arrayfactor(pos,ang); plot(ang,mag2db(abs(af.'))) xlabel('Angle (deg)') ylabel('Array pattern (dB)') ylim([-30 20]) title('Array Factor of Unsteered Uniform Linear Array')
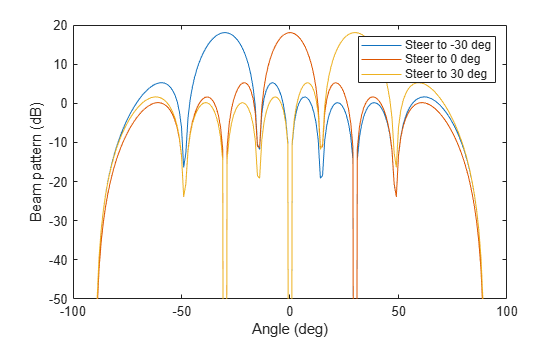
Display the array beam patterns for an 8-element ULA with half-wavelength spacing. Steer the array to -30, 0, and 30 degrees.
Set the positions of the ULA elements.
pos = (0:7)*0.5;
Define the steering direction weights.
angsteer = [-30 0 30]; wsteer = steervec(pos,angsteer);
Compute the array factors for each steering direction for all angles.
ang = -90:90; af = arrayfactor(pos,ang,wsteer);
Plot the array factor for each steering direction.
plot(ang,mag2db(abs(af.'))) xlabel('Angle (deg)') ylabel('Beam pattern (dB)') ylim([-50 20]) legend('Steer to -30 deg','Steer to 0 deg','Steer to 30 deg')
Input Arguments
Output Arguments
References
[1] Van Trees, Harry L. Detection, Estimation, and Modulation Theory. 4: Optimum Array Processing. Wiley, 2002.
[2] Johnson, Don H. and D. Dudgeon. Array Signal Processing. Englewood Cliffs, NJ: Prentice Hall, 1993.
[3] Van Veen, B.D. and K. M. Buckley. “Beamforming: A versatile approach to spatial filtering”
Extended Capabilities
Version History
Introduced in R2022a