move
3차원의 모든 축에서 Ryze 드론 이동
애드온 필요: 이 기능을 사용하려면 MATLAB Support Package for Ryze Tello Drones 애드온이 필요합니다.
설명
move(는 droneObj,relativeCoordinate)relativeCoordinate로 지정된 x, y, z 축의 상대 거리만큼 Ryze Tello 드론을 이동합니다.
move(는 droneObj,relativeCoordinate,Name,Value)Name,Value 쌍으로 된 인수로 지정된 추가 옵션을 사용하여 x, y, z 축의 상대 거리만큼 Ryze Tello 드론을 이동합니다.
다음 계략도는 쿼드콥터의 축 특성을 보여 줍니다.
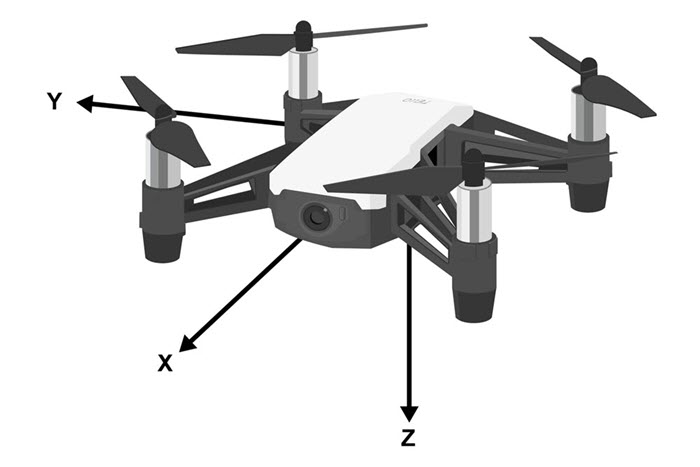
쿼드콥터 본체 축의 중심은 무게 중심에 있습니다.
x 축은 무게 중심에서 시작하여 쿼드콥터의 앞부분이 가리키는 방향을 가리킵니다.
y 축은 무게 중심에서 시작하여 쿼드콥터의 오른쪽을 가리킵니다.
z 축은 무게 중심에서 시작하여 오른손 법칙에 따라 쿼드콥터에서 아래쪽을 가리킵니다.
예제
입력 인수
이름-값 인수
버전 내역
R2020a에 개발됨