허용오차를 사용하여 산점 데이터 그룹화하기
이 예제에서는 관심 있는 점에 대한 근접성을 기반으로 하여 산포된 데이터 점을 그룹화하는 방법을 보여줍니다.
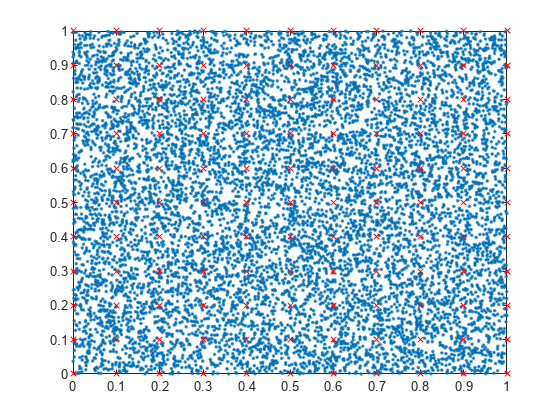
임의의 2차원 점 집합을 만듭니다. 그런 다음 임의의 데이터 위에 균일한 간격의 점으로 구성된 그리드를 만들어 플로팅합니다.
x = rand(10000,2); [a,b] = meshgrid(0:0.1:1); gridPoints = [a(:), b(:)]; plot(x(:,1), x(:,2), '.') hold on plot(gridPoints(:,1), gridPoints(:,2), 'xr', 'Markersize', 6)
ismembertol을 사용하여 x의 데이터 점 중 gridPoints의 그리드 점 허용오차 범위 내에 있는 데이터 점을 찾습니다. 다음 옵션을 ismembertol에 사용할 수 있습니다.
점 좌표가
x의 행에 있으므로ByRows를true로 지정합니다.OutputAllIndices를true로 지정하여x의 행 중gridPoints에서 대응하는 행의 허용오차 범위 내에 있는 모든 행 인덱스를 반환합니다.
[LIA,LocB] = ismembertol(gridPoints, x, 0.05, ... 'ByRows', true, 'OutputAllIndices', true);
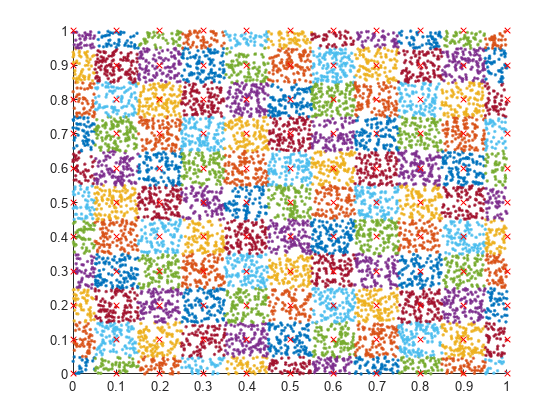
각 그리드 점에 대해 해당 그리드 점의 허용오차 범위 내에 있는 x의 점을 플로팅합니다.
figure hold on for k = 1:length(LocB) plot(x(LocB{k},1), x(LocB{k},2), '.') end plot(gridPoints(:,1), gridPoints(:,2), 'xr', 'Markersize', 6)