직렬 포트 통신을 사용하여 Arduino에서 스트리밍 데이터 읽어오기
이 예제에서는 serialport 인터페이스를 사용하여 Arduino® 보드에서 스트리밍 ASCII 종결 데이터를 읽어오는 콜백을 활성화하는 방법을 보여줍니다.
이 예제에서는 Arduino Due를 사용하지만, 대부분의 Arduino 보드에 적용됩니다.
Arduino에 프로그램 업로드하기
Arduino 보드를 컴퓨터에 연결합니다.
Arduino IDE를 사용하여 다음 프로그램을 Arduino® 보드에 업로드합니다. 이 프로그램은 "캐리지 리턴" 및 "라인 피드" 종결자가 뒤에 오는, 사인파의 연속적인 점들을 기록합니다. 편의를 위해 이 프로그램은 예제 폴더에 SineWavePoints.``ino로 제공됩니다.
/*
SineWavePoints
Write sine wave points to the serial port, followed by the Carriage Return and LineFeed terminator.
*/
int i = 0;
// The setup routine runs once when you press reset:
void setup() {
// Initialize serial communication at 9600 bits per second:
Serial.begin(9600);
}
// The routine loops forever:
void loop() {
// Write the sinewave points, followed by the terminator "Carriage Return" and "Linefeed".
Serial.print(sin(i*50.0/360.0));
Serial.write(13);
Serial.write(10);
i += 1;
}
Arduino에 대한 연결 설정하기
MATLAB에서 기존 serialport 연결을 모두 닫습니다.
delete(serialportfind);
Arduino가 연결되어 있는 직렬 포트를 찾습니다. Arduino IDE에서 이 직렬 포트를 식별할 수 있습니다. 이 예제에서는 연결부가 포트 COM4에 있는 것으로 Arduino IDE에 나타난다고 가정합니다. 사용 가능한 모든 포트를 나열하여 이 포트가 컴퓨터에 있는지 확인합니다.
serialportlist("available")ans = 1×2 string array
"COM3" "COM4"
serialport 객체를 만들어 Arduino Due에 연결합니다. Arduino 코드에 지정된 포트와 보드 레이트를 사용합니다.
serialObj = serialport("COM4",9600)serialObj =
Serialport with properties:
Port: "COM4"
BaudRate: 9600
Tag: ""
NumBytesAvailable: 15
Show all properties, functions
데이터 스트리밍을 시작하기 위한 serialport 객체 준비하기
속성을 구성하고 오래된 데이터를 지워 serialport 객체를 구성합니다.
Arduino 코드에 지정된 종결자와 일치하도록 Terminator 속성을 설정합니다.
configureTerminator(serialObj,"CR/LF");serialport 객체를 플러시하여 오래된 데이터를 모두 제거합니다.
flush(serialObj);
Arduino 데이터를 저장하기 위한 UserData 속성을 준비합니다. 이 경우 Data 필드에 사인파 값이 들어 있고 수집된 데이터 점 개수를 Count가 기록하는, 구조체가 되도록 UserData를 정의합니다. 이 구조체를 사용하면 체계적이고 효율적인 액세스가 가능하고 관련 정보 업데이트도 가능합니다.
serialObj.UserData = struct("Data",[],"Count",1)
serialObj =
Serialport with properties:
Port: "COM4"
BaudRate: 9600
Tag: ""
NumBytesAvailable: 0
Show all properties, functions
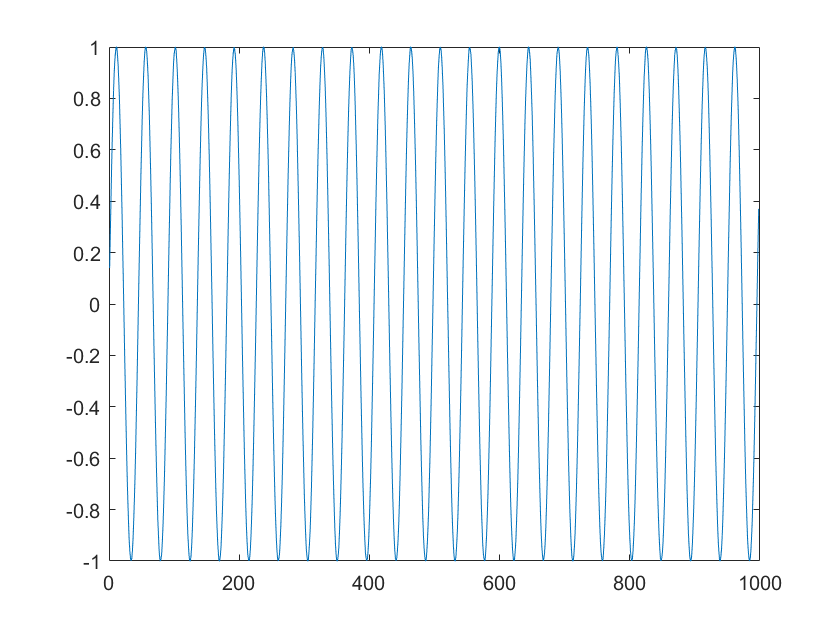
예제 폴더에 있는 파일 readSineWaveData.m은 처음 1,000개의 ASCII 종결 사인파 데이터 점을 읽어오고 그 결과를 플로팅하는 콜백 함수를 정의합니다. 이 함수는 데이터 플로팅 시점을 결정하는 인수 maxDataPoints를 받습니다.
function readSineWaveData(src, ~, maxDataPoints) % Read the ASCII data from the serialport object. data = readline(src); % Convert the string data to numeric type and save it in the UserData % property of the serialport object. src.UserData.Data(end+1) = str2double(data); % Update the Count value of the serialport object. src.UserData.Count = src.UserData.Count + 1; % If over maxDataPoints points have been collected from the Arduino, switch off the % callbacks and plot the data, starting from the second point. if src.UserData.Count > maxDataPoints configureCallback(src, "off"); plot(src.UserData.Data(2:end)); end end
종결자로 표시된 새 데이터를 Arduino에서 읽어올 수 있을 때마다 readSineWaveData 함수를 실행하도록 직렬 포트 객체를 구성합니다. 다음 configureCallback 명령은 BytesAvailableFcnMode를 "terminator"로 설정하고, BytesAvailableFcn 속성을 readSineWaveData 함수에 대한 핸들로 설정합니다.
maxDataPoints = 1002;
configureCallback(serialObj, "terminator", @(src,event) readSineWaveData(src,event,maxDataPoints))콜백 함수가 호출되면 처음 1000개의 데이터 점 플롯이 있는 MATLAB Figure가 열립니다.