crossfix
Intersection points for pairs of great circles or small circles
Syntax
Description
[
finds the intersection points of pairs of great circles. Define each great circle by
specifying the latitude latIntersect,lonIntersect] = crossfix(lat,lon,az)lat and longitude lon of a
point on the circle and the azimuth az at that point.
[
enables you to find the intersection points of great circles and small circles. When an
element of latIntersect,lonIntersect] = crossfix(lat,lon,az_radius,ind)ind is 0, the corresponding elements of
lat and lon define the center of a small circle,
and az_radius specifies the radius of the small circle. When an element
of ind is 1, the corresponding element of
lat and lon define a point on a great circle,
and az_radius specifies the azimuth.
[
finds the intersection point closest to the point specified by
latIntersect,lonIntersect] = crossfix(lat,lon,az_radius,ind,latEstimate,lonEstimate)latEstimate and lonEstimate.
[
specifies the angle units for the coordinates, azimuth, and radii, in addition to any
combination of input arguments from the previous syntaxes.latIntersect,lonIntersect] = crossfix(___,units)
mat = crossfix(___)mat.
Examples
Define three great circles by specifying a point on each circle and the azimuth at each point.
lat = [0 5 0]; lon = [0 5 10]; az = [80 240 310];
Find the intersections of the great circles.
[latIntersect,lonIntersect] = crossfix(lat,lon,az)
latIntersect = 3×2
0.9022 -0.9022
1.4526 -1.4526
-4.6654 4.6654
lonIntersect = 3×2
174.8759 -5.1241
8.2683 -171.7317
-175.5811 4.4189
Visualize the results. First, generate the latitude and longitude coordinates of each great circle.
[lat1,lon1] = track1(lat(1),lon(1),az(1)); [lat2,lon2] = track1(lat(2),lon(2),az(2)); [lat3,lon3] = track1(lat(3),lon(3),az(3));
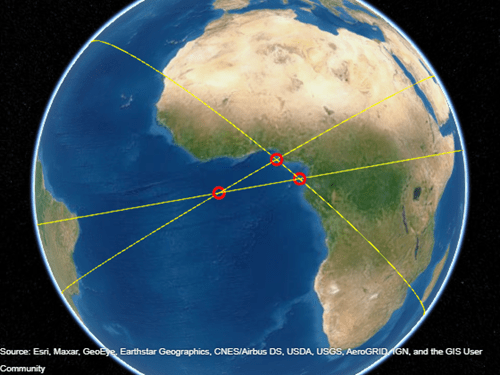
Display the great circles on a globe.
uif = uifigure; g = geoglobe(uif,"Terrain","none"); hold(g,"on") geoplot3(g,lat1,lon1,0,"y") geoplot3(g,lat2,lon2,0,"y") geoplot3(g,lat3,lon3,0,"y")
Display the intersection points. Note that there are three additional intersection points on the other side of the globe.
geoplot3(g,reshape(latIntersect,[6 1]),reshape(lonIntersect,[6 1]),0, ... "ro","LineWidth",3)
Define three small circles by specifying their centers and radii. Specify the radii using spherical distances in degrees.
lat = [0 5 0]; lon = [0 5 10]; r = [8 8 8];
Find the intersections of the small circles. Indicate that the third argument contains radii (instead of azimuths) by specifying the fourth argument as a vector of 0 values.
ind = [0 0 0]; [latIntersect,lonIntersect] = crossfix(lat,lon,r,ind)
latIntersect = 3×2
7.5594 -2.5744
6.2529 -6.2529
7.5594 -2.5744
lonIntersect = 3×2
-2.6260 7.5770
5.0000 5.0000
12.6260 2.4230
Visualize the results on a map. First, generate the latitude and longitude coordinates of each small circle.
[lat1,lon1] = scircle1(lat(1),lon(1),r(1)); [lat2,lon2] = scircle1(lat(2),lon(2),r(2)); [lat3,lon3] = scircle1(lat(3),lon(3),r(3));
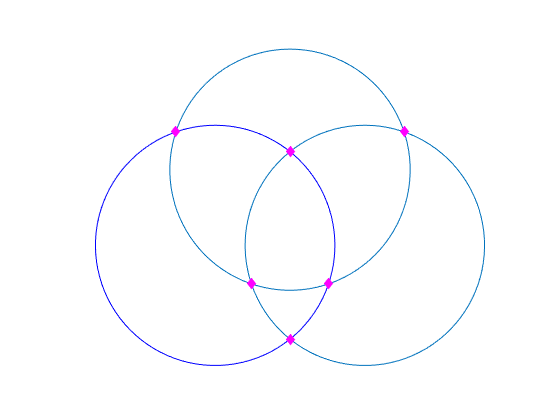
Display the small circles on a map.
figure axesm("mercator","MapLatLim",[-10 15],"MapLonLim",[-10 20]) axis off geoshow(lat1,lon1,"DisplayType","line","Color","b","LineStyle","-") geoshow(lat2,lon2,"DisplayType","line") geoshow(lat3,lon3,"DisplayType","line")
Display the intersection points using magenta diamond markers.
geoshow(reshape(latIntersect,[6 1]),reshape(lonIntersect,[6 1]), ... "DisplayType","point","Marker","d","MarkerEdgeColor","m","MarkerFaceColor","m")
Define three small circles by specifying their centers and radii. Specify the radii using spherical distances in degrees.
lat = [0 5 0]; lon = [0 5 10]; r = [8 8 8];
Estimate an intersection point. Then, find the intersections of the small circles that are closest to the estimated point. Indicate that the third argument contains radii (instead of azimuths) by specifying the fourth argument as a vector of 0 values.
latEstimate = 0; lonEstimate = 5; ind = [0 0 0]; [latIntersect,lonIntersect] = crossfix(lat,lon,r,ind,latEstimate,lonEstimate)
latIntersect = 3×1
-2.5744
6.2529
-2.5744
lonIntersect = 3×1
7.5770
5.0000
2.4230
Visualize the results on a map. First, generate the latitude and longitude coordinates of each small circle.
[lat1,lon1] = scircle1(lat(1),lon(1),r(1)); [lat2,lon2] = scircle1(lat(2),lon(2),r(2)); [lat3,lon3] = scircle1(lat(3),lon(3),r(3));
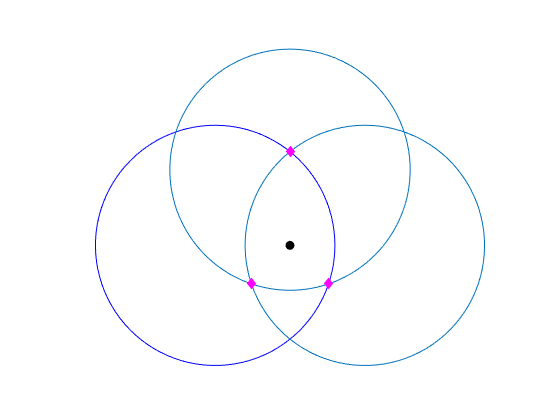
Display the small circles on a map.
figure axesm("mercator","MapLatLim",[-10 15],"MapLonLim",[-10 20]) axis off geoshow(lat1,lon1,"DisplayType","line","Color","b","LineStyle","-") geoshow(lat2,lon2,"DisplayType","line") geoshow(lat3,lon3,"DisplayType","line")
Display the estimated point using a black circle marker. Display the intersection points that are closest to the estimated point using magenta diamond markers.
geoshow(latEstimate,lonEstimate, ... "DisplayType","point","Marker","o","MarkerEdgeColor","k","MarkerFaceColor","k") geoshow(reshape(latIntersect,[3 1]),reshape(lonIntersect,[3 1]), ... "DisplayType","point","Marker","d","MarkerEdgeColor","m","MarkerFaceColor","m")
Input Arguments
Output Arguments
Tips
To find intersection points by using rhumb line azimuths and nautical mile distances, use the
navfixfunction.
Version History
Introduced before R2006a