Antagonistic McKibben Muscle Actuator
This demo shows a muscle actuation based on two air muscle actuators (or McKibben artificial muscles) in antagonistic connection. The air muscle actuators are connected to the opposite sides of a lever. The 4-way directional valve is controlled by an electro-mechanical valve actuator. In the 4-way directional valve when the high-pressure path P-A and return line B-T are open, the top air muscle actuator contracts and forces the bottom air muscle actuator on the opposite side to extend. Similarly, as the high-pressure path P-B and return line A-T open, the bottom air muscle actuator starts to contract and forces the top air muscle actuator to extend. The oscillating motions of the muscles are converted into the angular rotation of the output load connected to the mechanical linkage modeled with the slider-cranks.
Model

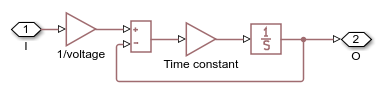
Electro-Mechanical Valve Actuator Subsystem
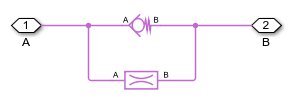
Flow Control Valve Subsystems
Load Subsystem

Simulation Results from Scopes

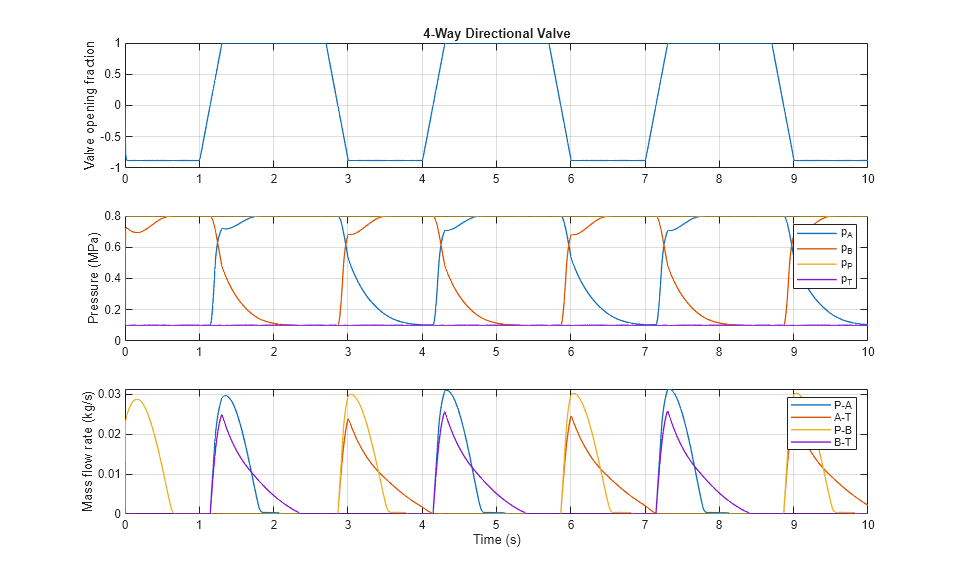
Simulation Results from Simscape Logging
The plots below show the pressures across and mass flow rates through the 4-Way Directional Valve (G) for a given voltage signal.
The plot below shows the pressure and mass flow rates in air muscle actuators.
