Compare Surrogate Optimization with Other Solvers
This example compares surrogateopt to two other solvers: fmincon, the recommended solver for smooth problems, and patternsearch, the recommended solver for nonsmooth problems. The example uses a nonsmooth function on a two-dimensional region.
function [f, g] = nonSmoothFcn(x) %NONSMOOTHFCN is a non-smooth objective function % Copyright 2005 The MathWorks, Inc. for i = 1:size(x,1) if x(i,1) < -7 f(i) = (x(i,1))^2 + (x(i,2))^2 ; elseif x(i,1) < -3 f(i) = -2*sin(x(i,1)) - (x(i,1)*x(i,2)^2)/10 + 15 ; elseif x(i,1) < 0 f(i) = 0.5*x(i,1)^2 + 20 + abs(x(i,2))+ patho(x(i,:)); elseif x(i,1) >= 0 f(i) = .3*sqrt(x(i,1)) + 25 +abs(x(i,2)) + patho(x(i,:)); end end %Calculate gradient g = NaN; if x(i,1) < -7 g = 2*[x(i,1); x(i,2)]; elseif x(i,1) < -3 g = [-2*cos(x(i,1))-(x(i,2)^2)/10; -x(i,1)*x(i,2)/5]; elseif x(i,1) < 0 [fp,gp] = patho(x(i,:)); if x(i,2) > 0 g = [x(i,1)+gp(1); 1+gp(2)]; elseif x(i,2) < 0 g = [x(i,1)+gp(1); -1+gp(2)]; end elseif x(i,1) >0 [fp,gp] = patho(x(i,:)); if x(i,2) > 0 g = [.15/sqrt(x(i,1))+gp(1); 1+ gp(2)]; elseif x(i,2) < 0 g = [.15/sqrt(x(i,1))+gp(1); -1+ gp(2)]; end end function [f,g] = patho(x) Max = 500; f = zeros(size(x,1),1); g = zeros(size(x)); for k = 1:Max %k arg = sin(pi*k^2*x)/(pi*k^2); f = f + sum(arg,2); g = g + cos(pi*k^2*x); end end end
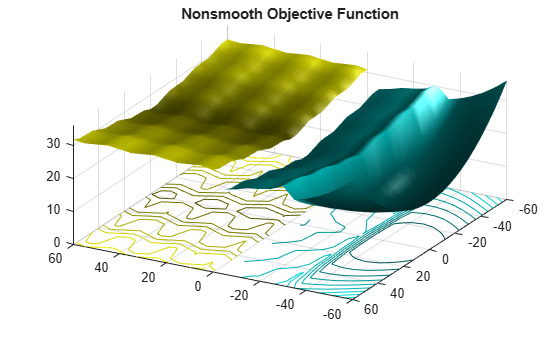
To get an idea of the function's behavior, plot the function.
mplier = 0.1; % Scale the control variable Objfcn = @(x)nonSmoothFcn(mplier*x); % Handle to the objective function range = [-6 6;-6 6]/mplier; % Range used to plot the objective function rng default % Reset the global random number generator showNonSmoothFcn(Objfcn,range); title("Nonsmooth Objective Function") view(-151,44)
See how well surrogateopt does in locating the global minimum within the default number of iterations.
lb = -6*ones(1,2)/mplier; ub = -lb; [xs,fvals,eflags,outputs] = surrogateopt(Objfcn,lb,ub);
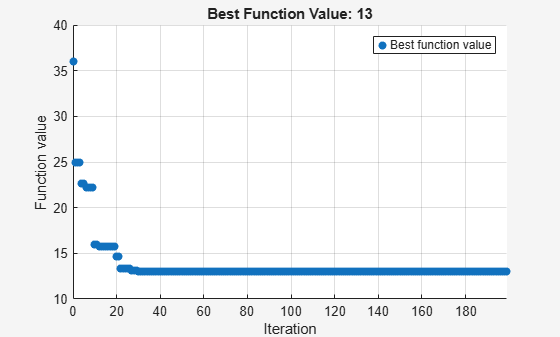
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
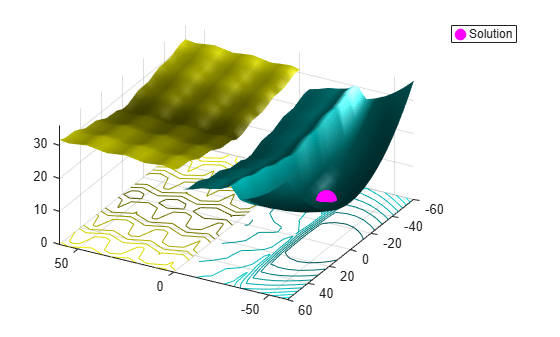
fprintf("Lowest found value = %g.\r",fvals)Lowest found value = 13.
figure showNonSmoothFcn(Objfcn,range); view(-151,44) hold on p1 = plot3(xs(1),xs(2),fvals,"om",MarkerSize=15,MarkerFaceColor="m"); legend(p1,"Solution") hold off
Compare with patternsearch
Set patternsearch options to use the same number of function evaluations, starting from a random point within the bounds.
rng default x0 = lb + rand(size(lb)).*(ub - lb); optsps = optimoptions("patternsearch",MaxFunctionEvaluations=200,PlotFcn="psplotbestf"); [xps,fvalps,eflagps,outputps] = patternsearch(Objfcn,x0,[],[],[],[],lb,ub,[],optsps);
patternsearch stopped because the mesh size was less than options.MeshTolerance.
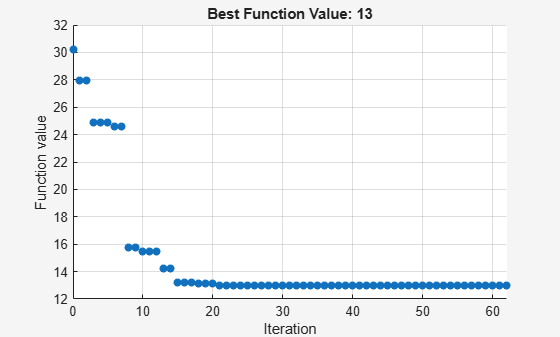
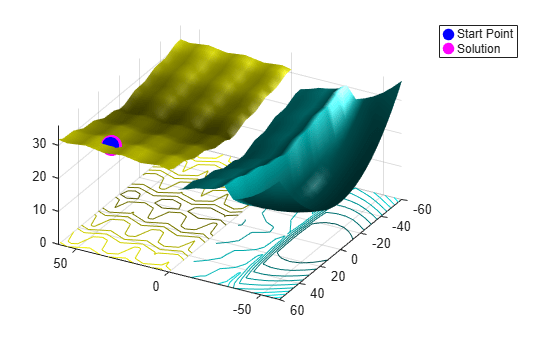
figure showNonSmoothFcn(Objfcn,range); view(-151,44) hold on p1 = plot3(x0(1),x0(2),Objfcn(x0),"ob",MarkerSize=12,MarkerFaceColor="b"); p2 = plot3(xps(1),xps(2),fvalps,"om",MarkerSize=15,MarkerFaceColor="m"); legend([p1,p2],["Start Point","Solution"]) hold off
patternsearch finds the same solution as surrogateopt.
Restrict the number of function evaluations and try again.
optsurr = optimoptions("surrogateopt",MaxFunctionEvaluations=40);
[xs,fvals,eflags,outputs] = surrogateopt(Objfcn,lb,ub,optsurr);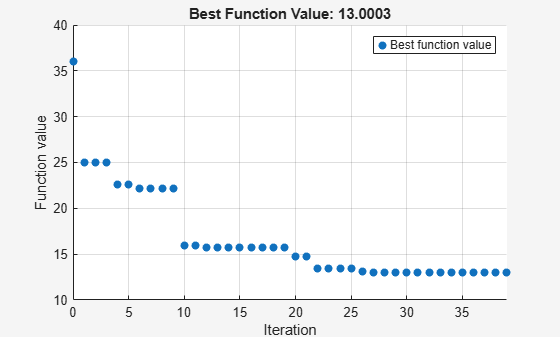
surrogateopt stopped because it exceeded the function evaluation limit set by 'options.MaxFunctionEvaluations'.
optsps.MaxFunctionEvaluations = 40; [xps,fvalps,eflagps,outputps] = patternsearch(Objfcn,x0,[],[],[],[],lb,ub,[],optsps);
patternsearch stopped because it exceeded options.MaxFunctionEvaluations.
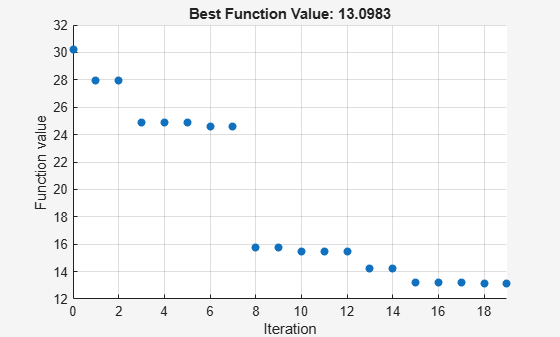
Again, both solvers find the global solution quickly.
Compare with fmincon
fmincon is efficient at finding a local solution near the start point. However, it can easily get stuck far from the global solution in a nonconvex or nonsmooth problem.
Set fmincon options to use a plot function, the same number of function evaluations as the previous solvers, and the same start point as patternsearch.
opts = optimoptions("fmincon",PlotFcn="optimplotfval",MaxFunctionEvaluations=200); [fmsol,fmfval,eflag,fmoutput] = fmincon(Objfcn,x0,[],[],[],[],lb,ub,[],opts);
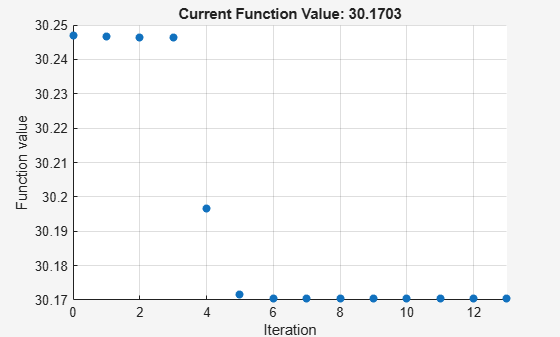
Local minimum possible. Constraints satisfied. fmincon stopped because the size of the current step is less than the value of the step size tolerance and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
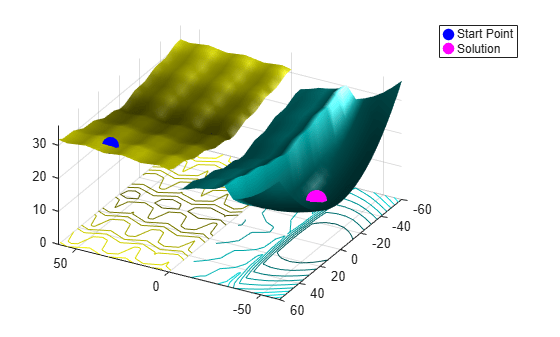
figure showNonSmoothFcn(Objfcn,range); view(-151,44) hold on p1 = plot3(x0(1),x0(2),Objfcn(x0),"ob",MarkerSize=12,MarkerFaceColor="b"); p2 = plot3(fmsol(1),fmsol(2),fmfval,"om",MarkerSize=15,MarkerFaceColor="m"); legend([p1,p2],["Start Point","Solution"]) hold off
fmincon is stuck in a local minimum near the start point.
See Also
fmincon | patternsearch | surrogateopt