pmdemod
위상 복조
설명
예제
샘플 레이트를 설정합니다. 신호를 플로팅하기 위해 시간 벡터를 만듭니다.
fs = 50; t = (0:2*fs+1)'/fs;
정현파 입력 신호를 생성합니다.
x = sin(2*pi*t) + sin(4*pi*t);
반송 주파수와 위상 편차를 설정합니다.
fc = 10; phasedev = pi/2;
입력 신호를 변조합니다.
tx = pmmod(x,fc,fs,phasedev);
신호를 AWGN 채널에 통과시킵니다.
rx = awgn(tx,10,'measured');잡음이 있는 신호를 복조합니다.
y = pmdemod(rx,fc,fs,phasedev);
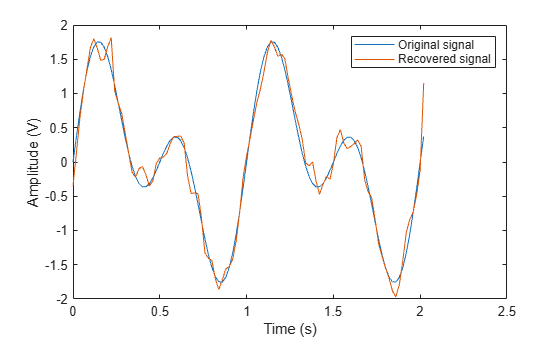
원래 신호와 복원된 신호를 플로팅합니다.
figure; plot(t,[x y]); legend('Original signal','Recovered signal'); xlabel('Time (s)') ylabel('Amplitude (V)')
입력 인수
출력 인수
버전 내역
R2006a 이전에 개발됨