What Is AUTOSAR?
AUTOSAR (AUTomotive Open System ARchitecture) is a worldwide development partnership of vehicle manufacturers, suppliers, and other companies from the electronics, semiconductor, and software industries. The AUTOSAR standard is designed to enable software standardization, reuse, and interoperability.
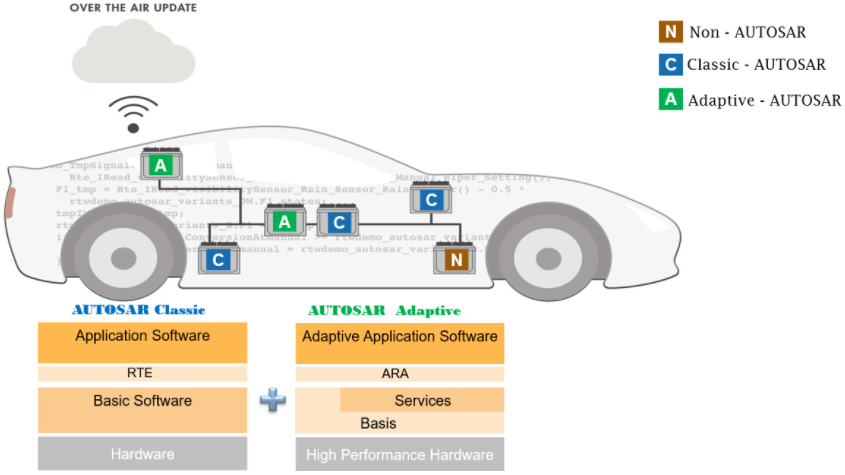
The AUTOSAR standard provides two platforms to support the current and future generations of automotive electronic control units (ECUs):
AUTOSAR Classic Platform — This platform supports traditional internal applications such as powertrain, chassis, body, and interior electronics.
AUTOSAR Adaptive Platform — This platform supports service-based applications such as automated driving, Car-to-X, software updates over-the-air (OTA), and vehicles as part of the Internet of Things (IoT).
AUTOSAR Classic, AUTOSAR Adaptive, and Non-AUTOSAR ECUs can interoperate within a single car.
For an overview of the AUTOSAR Standard, see AUTOSAR Standard.
AUTOSAR Platforms
AUTOSAR is based on the software architecture and categorized by two platforms: AUTOSAR Classic and AUTOSAR Adaptive Platforms. The AUTOSAR Classic Platform is a solution for embedded systems with hard real-time and safety constraints. The AUTOSAR Adaptive Platform is a solution for high-performance computing ECUs to build fail-operational systems such as autonomous driving.
The AUTOSAR Classic Platform architecture has three layers:
Application Software — Provides application implementations in self-contained units called software components. Building software components generates platform-compliant AUTOSAR XML descriptions and C code implementation modules.
Runtime Environment (RTE) — Provides communication between application software and basic software. Software components communicate with other components and/or basic software modules exclusively through the RTE, which allows software components to be independent of any specific ECU and other software components.
Basic Software (BSW) — Provides ECU abstraction, microcontroller abstraction, and services, including memory and diagnostics.
The AUTOSAR Adaptive Platform architecture has layers similar to AUTOSAR Classic Platform but is a service-oriented architecture (SOA), which provides a foundation to handle highly compute intensive applications. The Adaptive Platform supports POSIX operating systems.
For more information about AUTOSAR platforms, see Comparison of AUTOSAR Classic and Adaptive Platforms.
Develop AUTOSAR Systems in Simulink
Simulink® natively supports the AUTOSAR standard. To develop AUTOSAR software in Simulink:
Use Simulink and AUTOSAR Blockset to design and simulate AUTOSAR Classic and Adaptive systems.
Optionally, use System Composer™ to author hierarchies of AUTOSAR software compositions and components.
Use Embedded Coder® to generate ARXML descriptions and production C or C++ algorithmic code for testing and AUTOSAR RTE integration.
Simulink, AUTOSAR Blockset, and Embedded Coder support round-trip integration with AUTOSAR architectures, as illustrated below:

You can use an AUTOSAR Authoring Tool or Simulink to create and export an ARXML file. This ARXML file is used to develop AUTOSAR SWCs.
SWCs are then imported to Simulink to generate a model, or update an existing model. At this point C code can be generated and the model can undergo SIL/PIL testing.
You can export updated ARXML files including any changes you may have made. These files can be used to update SWCs and future ARXML versions by Simulink or other AUTOSAR Authoring Tools.
AUTOSAR Blockset is qualified for use with the ISO 26262 standard. Optionally, use the IEC Certification Kit to qualify generated AUTOSAR code for ISO 26262. For more information about qualification, see the Highway Lane Following: A Model-Based Design Example for ISO 26262:2018 (IEC Certification Kit) example.