위성 시나리오 핵심 개념
Aerospace Toolbox satelliteScenario 객체는 궤도상의 위성을 모델링하고 시각화하며, 지상국과의 통신 연결을 계산하고, 통신 링크를 시각화 및 분석할 수 있는 기능을 제공합니다. 이 항목에서는 시나리오 시각화에서 자주 접하는 기술 용어에 대한 개요를 제공합니다.
좌표계
측지 좌표
측지 좌표계는 좌표(lat, lon, h)를 사용하여 기준 타원체에 대한 위치를 나타냅니다. 위성 시나리오의 모든 측지 좌표는 WGS 84(World Geodetic System, 1984)를 기준 타원체로 사용합니다. WGS 84의 좌표 원점은 지구의 질량 중심에 위치합니다.
lat는 위도로, 적도에서 시작됩니다. 보다 구체적으로, 한 지점의 위도는 해당 지점에서 타원체에 대한 법선이 적도면(타원체의 중심과 적도를 포함하는 면)과 이루는 각도입니다. 위도의 각도 범위는 [–90°, 90°]입니다. 위도가 양수이면 북쪽, 음수이면 남쪽을 나타냅니다.

lon은 경도로, 본초 자오선에서 시작됩니다. 보다 구체적으로, 한 지점의 경도는 타원체 중심을 포함하는 평면과 해당 지점을 포함하는 자오선이 타원체 중심과 본초 자오선을 포함하는 평면과 이루는 각도입니다. 양의 경도는 북극 위의 관측 지점에서 내려다보면 시계 반대 방향으로 측정됩니다. 일반적으로 경도의 범위는 [–180°, 180°] 또는 [0°, 360°]입니다.

h는 타원체 높이로, 기준 회전타원체의 법선을 따라 측정됩니다.

지구중심고정 좌표
ECEF(Earth-centered Earth-fixed: 지구중심고정) 좌표계는 카테시안 좌표(X, Y, Z)를 사용하여 기준 타원체의 중심을 기준으로 위치를 나타냅니다. 타원체 중심과 지구 중심 간의 거리는 기준 타원체에 따라 달라집니다. 위성 시나리오에서는 지구의 질량 중심과 일치하는 중심을 갖는 WGS 84 기준 타원체를 사용합니다.
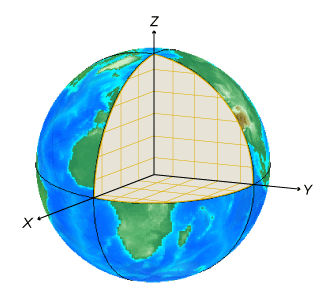
양의 X축은 적도와 본초 자오선이 만나는 위도 0°, 경도 0°에서 타원체의 표면과 교차합니다.
양의 Y축은 위도 0°, 경도 90°에서 타원체의 표면과 교차합니다.
양의 Z축은 위도 90°에서 타원체의 표면과 교차합니다.
참고
경계선 및 지역 레이블은 데이터 공급자가 제공한 대로 정렬된 것이며, 이러한 지도 데이터의 내용은 MathWorks®의 입장을 나타내지 않습니다.
기준 프레임과 NED(North East Down: 북쪽 동쪽 아래쪽) 프레임
우주의 한 지점을 설명하려면 별을 기준으로 회전하지 않는 기준 프레임이 필요합니다. satelliteScenario 객체에 Satellite 객체를 추가할 때, 지구 중심에 원점이 있고 직교 벡터 I, J, K를 갖는 GCRF(Geocentric Celestial Reference Frame)가 기준 프레임으로 사용됩니다. 기본 평면은 IJ 평면으로, 적도에 가깝게 정렬되며 지구 자전축의 세차 운동(precession)과 회전축 진동(nutation)으로 인해 시간 경과에 따라 변하는 작은 오프셋을 갖습니다. 궤도 요소를 사용하여 위성 시나리오에 위성을 추가하는 경우 좌표는 지구 중심 천체 기준 프레임에 정의된 것으로 간주됩니다.

위치, 속도, 가속도, 방향, 각속도를 언급할 때는 이러한 수치가 표현되는 좌표계를 언급해야 합니다. GCRF 좌표계와 측지 좌표계 같은 전역 좌표계는 3-요소 좌표를 사용하여 물체의 위치를 설명합니다. NED 좌표계와 AER(Azimuth Elevation Range: 방위각 고도 거리) 좌표계 같은 로컬 좌표계에는 두 개의 3-요소 좌표가 필요합니다. 한 3-요소 좌표는 원점의 위치를 설명하고 다른 3-요소 좌표는 원점에 대한 물체의 위치를 설명합니다.
NED 좌표계는 카테시안 좌표(xNorth, yEast, zDown)를 사용하여 로컬 원점을 기준으로 위치를 나타냅니다. 로컬 원점은 측지 좌표(lat0, lon0, h0)로 설명됩니다. 일반적으로 NED 좌표계의 로컬 원점은 지구 표면 위에 있습니다.
양의 xNorth 축은 lon0을 포함하는 경도의 자오선을 따라 북쪽을 가리킵니다.
양의 yEast 축은 lat0을 포함하는 위도의 평행선을 따라 동쪽을 가리킵니다.
양의 zDown축이 타원체의 법선 방향을 따라 아래쪽을 가리킵니다.
NED 좌표계는 일반적으로 이동 중인 위성을 기준으로 위치를 지정하는 데 사용됩니다. 이 경우 좌표는 위성의 프레임에 고정되는 것이 아니라, 위성의 위도와 경도에 해당하는 WGS 84 타원체 표면의 한 지점에 고정됩니다.
롤(Roll), 피치(Pitch), 요(Yaw)
세 개의 선이 위성을 관통하며 위성의 질량 중심에서 직각으로 교차합니다. 이 축은 위성에 대해 고정되어 있으며 NED 프레임에 대한 위성의 방향을 정의하는 데 사용됩니다. 방향은 다음 순서의 회전으로 정의됩니다.
요(yaw) 축을 중심으로 요(yaw) 각도만큼 회전
피치(pitch) 축을 중심으로 피치(pitch) 각도만큼 회전
롤(roll) 축을 중심으로 롤(roll) 각도만큼 회전

위성의 요, 피치, 롤 각도는 국제표준화기구(ISO) 규약을 따릅니다. 이 각도들은 축의 양의 방향을 바라볼 때 시계 방향이 양의 방향입니다. 별도로 명시되지 않는 한, Aerospace Toolbox는 기본적으로 이러한 각도에 대해 요-피치-롤(Z-Y-X) 회전 순서를 사용합니다.
AER(방위각 고도 거리) 좌표
AER 좌표계는 구형 좌표(az, elev, range)를 사용하여 로컬 원점을 기준으로 위치를 나타냅니다. 로컬 원점은 측지 좌표(lat0, lon0, h0)로 설명됩니다. 방위각, 고도, 경사 거리는 위성의 질량 중심에 원점이 있는 로컬 카테시안 좌표계(예: NED 좌표계)에 따라 달라집니다.
az는 방위각으로, 양의 xNorth축에서 평면으로의 물체 투영까지의 (xNorth)(yEast) 평면에서의 시계 방향 각도입니다.
elev는 고도로, (xNorth)(yEast) 평면에서 물체까지의 각도입니다.
range는 경사 거리로, 물체와 로컬 원점 간의 유클리드 거리입니다.

궤도 요소
궤도 요소는 특정 궤도를 고유하게 식별하는 데 필요한 파라미터입니다. 궤도와 위성 궤도 내 위성의 위치를 고유하게 정의하려면 최소 6개의 파라미터가 필요합니다. 이 중 3개의 파라미터는 궤도 평면의 모양과 타원 내 위성의 위치를 설명합니다. 나머지 3개의 파라미터는 천체 관성 기준 프레임에서 해당 평면의 방향과 해당 평면에서 위성의 위치를 설명합니다. 이 여섯 가지 파라미터를 케플러 요소 또는 궤도 요소라고 합니다.
아래 다이어그램에서 궤도면(노란색)은 기준면(회색)과 교차합니다. 지구 궤도를 도는 위성의 경우 기준면은 일반적으로 GCRF의 IJ 평면입니다.
다음 두 가지 요소는 타원의 모양과 크기를 정의합니다.
이심률(Eccentricity, e) — 원과 비교했을 때 타원의 모양이 얼마나 길쭉한지를 나타냅니다.
장축 반지름(Semimajor axis, a) — 근점과 원점 거리의 합을 2로 나눈 값입니다. 근점(periapsis)은 궤도를 도는 물체가 공전하는 물체의 질량 중심에 가장 가까운 지점입니다. 원점(apoapsis)은 궤도를 도는 물체가 공전하는 물체의 질량 중심에서 가장 멀리 떨어져 있는 지점입니다. 고전적인 2체 궤도의 경우 장축 반지름은 두 물체의 중심 간 거리입니다.
다음 두 가지 요소는 타원이 포함된 궤도면의 방향을 정의합니다.
경사각(Inclination, i) — 승교점(ascending node)에서 측정한 기준면에 대한 타원의 수직 기울기입니다. 승교점은 궤도가 기준면을 위쪽으로 통과하는 지점(다이어그램에서 녹색 각도 i)입니다. 기울기 각도는 궤도면과 기준면 간의 교차선에 대해 수직으로 측정됩니다. 타원 궤도면은 타원 위 임의의 세 점으로 정의됩니다.
적도 궤도부터 궤도면이 위로 기울어질 수 있습니다. 적도에서 위로 기울어진 각도를 경사각 i라고 하며, 범위는 [0,180]입니다. 지구 중심은 항상 궤도면에 있어야 하므로 위성이 궤도를 따라 북쪽으로 올라가면서 적도를 통과하는 지점이 승교점(ascending node)이고, 위성이 남쪽으로 내려가면서 적도를 통과하는 지점이 강교점(descending node)입니다. 적도에서 이 두 지점을 통과하는 선을 그리면 교점선(line of nodes)이 정의됩니다.
승교점의 적경각(Right ascension of ascending node, Ω) — RAAN은 GCRF X축과 승교점 사이의 각도입니다. RAAN은 이체 케플러 전파 모델을 사용하고 다른 섭동력이 없는 경우 항상 일정합니다. 섭동이 없는 경우 궤도는 우주에서 동일하게 유지되고 춘분이 GCRF의 X축이 되며 승교점은 움직이지 않습니다. 따라서 RAAN이 동일하게 유지됩니다. 승교점의 적경각(RAAN) 회전은 0°에서 360° 사이의 임의의 숫자가 될 수 있습니다.
승교점의 경도(Longitude of ascending node, LAN) — 지구 동기 위성의 경우 LAN은 지리적 경도나 국제 지상 기준 프레임(IRTF) x축과 승교점 사이의 각도를 나타냅니다. LAN에서 X축은 적도와 그리니치 자오선을 통과하는 선입니다. LAN을 계산하기 위해
RAAN - GMST를 사용할 수도 있습니다. 여기서 GMST는 그리니치 자오선 항성시입니다. 지구가 자전함에 따라 이 X축도 함께 회전하므로 LAN은 상수가 아닙니다. 지구 동기 위성의 경우 우주선이 승교점으로 돌아갈 때쯤이면 X축도 원래 위치로 돌아가므로 LAN이 상수로 나타납니다.
나머지 두 요소는 다음과 같습니다.
근점 편각(Argument of periapsis, ω) — 궤도면에서 타원의 방향으로, 승교점에서 근점까지 측정한 각도이며 범위는 [0, 360)입니다.
진근점 이각(True Anomaly, v) — 특정 시간에 타원을 따라 궤도를 도는 물체의 위치입니다. 경로상의 위성 위치는 근점에서 시계 반대 방향으로 측정되며, 이를 진근점 이각(true anomaly) ν라고 합니다. 범위는 [0, 360)입니다.
TLE(Two Line Element) 파일
Aerospace Toolbox satellite 함수는 TLE 파일을 입력으로 받습니다. TLE 파일을 다운로드하려면 Space track 웹사이트를 참조하십시오.
TLE 세트는 주어진 시점, 즉 Epoch에 대해 지구 궤도를 도는 물체의 궤도 요소 목록을 인코딩하는 데이터 형식입니다. 궤도 요소 파라미터는 다양한 형식의 텍스트로 인코딩할 수 있습니다. 가장 일반적인 형식은 NASA(미국 항공우주국) 또는 NORAD(북미항공우주방위사령부)의 TLE 형식입니다. 이 형식에서 각 위성에는 세 개의 행이 있습니다. 첫 번째 행에는 위성 이름이 포함되며 다음 두 행은 표준 TLE입니다.
다음 예제에서 보여주듯이 각 위성에 대한 데이터는 세 줄로 구성됩니다.
Satellite 1 1 25544U 98067A 04236.56031392 .00020137 00000-0 16538-3 0 9993 2 25544 51.6335 344.7760 0007976 126.2523 325.9359 15.70406856328906
행 1은 11자로 된 위성 이름입니다.
행 2와 행 3은 NORAD와 NASA에서 사용하는 것과 동일한 표준 TLE 세트 형식입니다.
아래 표에서는 행 2의 열을 설명합니다.
열 설명 예 1 Line number
13–7 Satellite number
255448 Elset classification
U10–17 International designator
98067A19–32 Element set epoch (UTC)
04236.5603139234–43 First derivative of the mean motion with respect to time
.0002013745–52 Second derivative of the mean motion with respect to time (decimal point assumed)
00000-054–61 BSTAR drag term
16538-363 Element set type
065–68 Element number
99969 Check sum (modulo 10)
3아래 표에서는 행 3의 열을 설명합니다.
열 설명 예 1 Line number of element data
23–7 Satellite number
255449–16 Inclination (in degrees)
51.633518–25 Right ascension of the ascending node (in degrees)
344.776027–33 Eccentricity (leading decimal point assumed)
000797635–42 Argument of perigee (in degrees)
126.252344–51 Mean anomaly (in degrees)
325.935953–63 Mean motion (in revs per day)
15.7040685664–68 Revolution number at epoch (in revs)
3289069 Check sum (modulo 10)
6
응용 분야와 물체 궤도에 따라 30일이 지난 TLE에서 파생된 데이터는 신뢰성이 떨어질 수 있습니다. SGP4(Simplified General Perturbations-4)와 SDP4(Simplified Deep-Space Perturbations-4) 알고리즘을 사용하여 TLE에서의 궤도 위치를 계산하십시오.
SEM(System Effectiveness Mode) Almanac
Aerospace Toolbox satellite 함수는 SEM Almanac 파일을 입력으로 받습니다. SEM 파일을 다운로드하려면 https://www.navcen.uscg.gov/gps-nanus-almanacs-opsadvisories-sof 웹사이트를 참조하십시오.
Almanac 파일은 GPS 및 기타 위성 내비게이션 시스템에서 위성을 찾고 사용하기 위해 사용하는 간소화된 안내서입니다. 이 파일에는 위성군에 속하는 각 위성의 위치와 상태에 대한 기본적인 정보가 포함되어 있습니다. Almanac 파일은 TLE 파일만큼 상세하거나 정확하지는 않습니다. 하지만 almanac 파일의 데이터는 이 정보를 최신 상태로 유지하기 위해 정기적으로 업데이트되어 전 세계에서 효율적인 탐색과 통신을 지원합니다. Almanac 파일의 SEM 형식은 주로 소프트웨어 툴의 입력으로 사용됩니다.
OMM(Orbit Mean-Elements Message) 파일
Aerospace Toolbox는 satellite에 대한 입력으로 OMM(Orbit Mean-Elements Message) 파일을 받습니다. OMM 파일은 CCSDS(우주 데이터 시스템 자문위원회)에서 개발한 ODM(궤도 데이터 메시지) 권장 표준 CCSDS 502.0-B-2의 일부입니다. OMM 파일을 사용하면 표준 쿼리를 사용하여 GP(일반 섭동) 데이터에 액세스할 수 있습니다. OMM 파일을 다운로드하려면 Space track이나 CelesTrak 웹사이트를 방문하십시오. Aerospace Toolbox는 .XML과 .JSON OMM 파일 형식을 지원합니다.
OMM 파일 형식은 CelesTrak®에서 정의합니다. 자세한 내용은 Orbit Data Messages를 참조하십시오.
Aerospace Toolbox는 OMM 파일의 다음 필드를 사용합니다. 다른 모든 필드는 무시됩니다.
| 술어 | 설명 | 예제 |
|---|---|---|
| 위성 이름. |
|
| 평균 요소 이론. 이 값은 |
|
| 평균 케플러 요소 Epoch. |
|
| 평균 운동(회전 수/일). |
|
| 이심률. |
|
| 경사각(단위: 도). |
|
| 승교점의 적경각(단위: 도). |
|
| 근점 편각(단위: 도). |
|
| 평균 근점 이각(단위: 도). |
|
| NORAD 카탈로그 번호(위성 번호). |
|
| 1/지구 반경의 SGP/SGP4 항력 유사 계수. |
|
참고 문헌
[1] “Basics of Space Flight” https://solarsystem.nasa.gov/basics/chapter5-1/.
[2] “CelesTrak. Frequently Asked Questions: Two-Line Element Set Format.” Accessed March 26, 2016. https://celestrak.com/columns/v04n03/.
참고 항목
객체
함수
show|play|hide|satellite|access|groundStation|satelliteScenarioViewer|conicalSensor