이 페이지는 기계 번역을 사용하여 번역되었습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
6자유도 모션 플랫폼 모델링
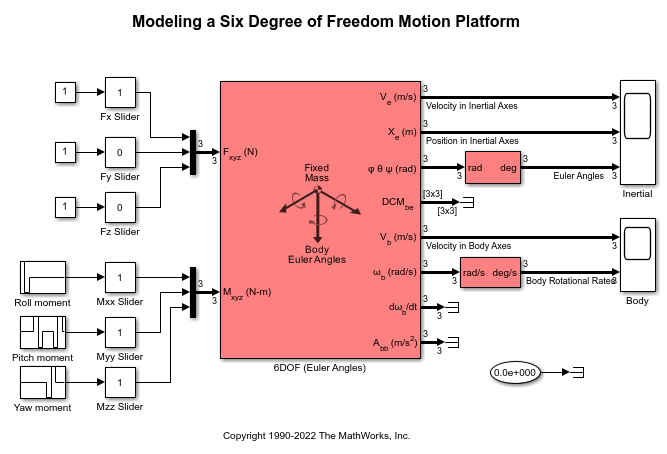
이 예제는 Aerospace Blockset™ 6자유도 운동 방정식 블록을 연결하는 방법을 보여줍니다. 이 모델은 운동 방정식에서 오일러 각을 사용하여 출력을 계산합니다.
두 개의 Scope 블록이 블록 출력을 플롯합니다. 관성 좌표계는 평탄 지구 기준 프레임에서의 속도와 위치, 그리고 오일러 회전 각도를 표시합니다. 바디는 바디 고정 프레임에서의 속도와 바디의 회전 속도를 플로팅합니다.
블록에 적용된 힘과 모멘트를 수정하려면 슬라이더 블록을 열고 스칼라 이득에 대한 슬라이더를 변경하십시오.