이 페이지는 기계 번역을 사용하여 번역되었습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
6DOF (Euler Angles)
6자유도 운동 방정식의 오일러 각 표현 구현
라이브러리:
Aerospace Blockset /
Equations of Motion /
6DOF
6DOF (Euler Angles) 블록의 대체 구성:
Simple Variable Mass 6DOF (Euler Angles) | Custom Variable Mass 6DOF (Euler Angles)
설명
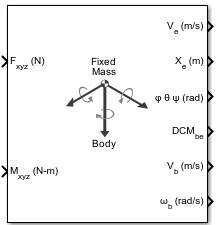
6DOF (Euler Angles) 블록은 평탄 지구 기준 프레임(Xe, Ye, Ze)을 중심으로 한 바디 고정 좌표계(Xb, Yb, Zb)의 회전을 고려하여, 6자유도 운동 방정식의 오일러 각 표현을 구현합니다. 이러한 기준점에 대한 자세한 내용은 알고리즘를 참조하십시오.
6DOF (Euler Angles), Simple Variable Mass 6DOF (Euler Angles) 및 Custom Variable Mass 6DOF (Euler Angles) 블록은 동일한 블록의 대체 구성입니다.
6DOF (Euler Angles) — 6자유도 운동 방정식의 오일러 각 표현 구현
Simple Variable Mass 6DOF (Euler Angles) — 단순 가변 질량에 대한 6자유도 운동 방정식의 오일러 각 표현 구현
Custom Variable Mass 6DOF (Euler Angles) — 사용자 지정 가변 질량에 대한 6자유도 운동 방정식의 오일러 각 표현 구현
제한 사항
이 블록은 가해진 힘이 물체의 무게 중심에서 작용하며, 질량과 관성이 일정하다고 가정합니다.
포트
입력
출력
파라미터
대체 구성
알고리즘
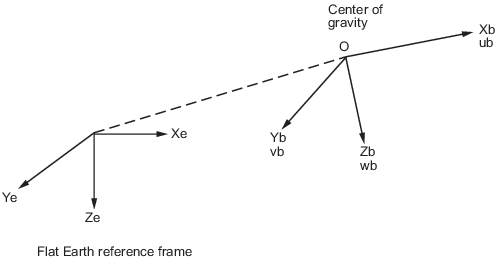
6DOF (Euler Angles) 블록은 이러한 기준 프레임 개념을 사용합니다.
바디 고정 좌표계의 원점은 바디의 무게 중심이며, 바디는 강체로 가정됩니다. 이 가정은 개별 질량 요소들 사이에 작용하는 힘을 고려할 필요가 없도록 합니다.
평탄 지구의 기준 프레임은 관성계로 간주되며, 이는 "고정된 별들"에 대한 지구의 상대 운동으로 인한 힘을 무시할 수 있게 하는 훌륭한 근사값입니다.
바디 고정 좌표계의 평행 이동 운동. 여기서 가해진 힘 [Fx Fy Fz]T는 바디 고정 프레임에 속하며, 바디의 질량 m은 일정하다고 가정합니다.
바디 고정 프레임의 회전 동특성. 가해진 모멘트는 [L M N]T이며, 관성 텐서 I는 원점 O를 기준으로 합니다.
바디 고정 각속도 벡터 [p q r]T와 오일러 각 변화율 간의 관계는 오일러 변화율을 바디 고정 좌표계로 변환함으로써 결정됩니다.
J를 역변환하면 오일러 속도 벡터를 결정하는 데 필요한 관계식을 얻을 수 있습니다.
참고 문헌
[1] Stevens, Brian, and Frank Lewis, Aircraft Control and Simulation. Hoboken, NJ: Second Edition, John Wiley & Sons, 2003.
[2] Zipfel, Peter H., Modeling and Simulation of Aerospace Vehicle Dynamics. Reston, Va: Second Edition, AIAA Education Series, 2007.
확장 기능
버전 내역
R2006a에 개발됨참고 항목
6DOF (Quaternion) | 6DOF ECEF (Quaternion) | 6DOF Wind (Quaternion) | 6DOF Wind (Wind Angles) | Custom Variable Mass 6DOF (Euler Angles) | Custom Variable Mass 6DOF (Quaternion) | Custom Variable Mass 6DOF ECEF (Quaternion) | Custom Variable Mass 6DOF Wind (Quaternion) | Custom Variable Mass 6DOF Wind (Wind Angles) | Simple Variable Mass 6DOF (Euler Angles) | Simple Variable Mass 6DOF (Quaternion) | Simple Variable Mass 6DOF ECEF (Quaternion) | Simple Variable Mass 6DOF Wind (Quaternion) | Simple Variable Mass 6DOF Wind (Wind Angles)