Simulation and Structured Text Generation for MPC Controller Block
This example shows how to simulate and generate structured text for an MPC Controller block by using Simulink® PLC Coder™ software. The generated code uses single-precision data.
Required Products
To run this example, Model Predictive Control Toolbox™, Simulink®, and Simulink PLC Coder™ are required.
if ~mpcchecktoolboxinstalled('simulink') disp('Simulink is required to run this example.') return end if ~mpcchecktoolboxinstalled('plccoder') disp('Simulink PLC Coder is required to run this example.'); return end if ~mpcchecktoolboxinstalled('mpc') disp('MPC Toolbox is required to run this example.'); return end
Define Plant Model and MPC Controller
Define a SISO plant.
plant = ss(tf([3 1],[1 0.6 1]));
Define the MPC controller for the plant.
Ts = 0.1; %Sample time p = 10; %Prediction horizon m = 2; %Control horizon Weights = struct('MV',0,'MVRate',0.01,'OV',1); % Weights MV = struct('Min',-Inf,'Max',Inf,'RateMin',-100,'RateMax',100); % Input constraints OV = struct('Min',-2,'Max',2); % Output constraints mpcobj = mpc(plant,Ts,p,m,Weights,MV,OV);
Simulate and Generate Structured Text
Open the Simulink model.
mdl = 'mpc_plcdemo';
open_system(mdl)
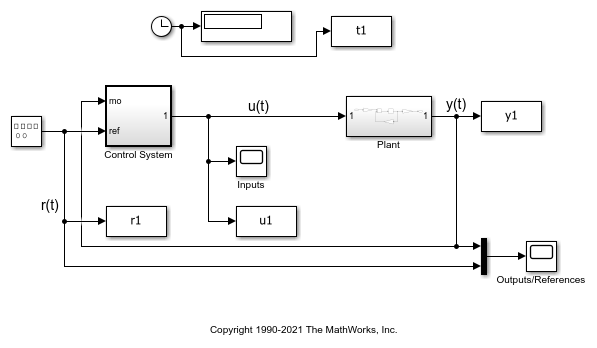
To generate structured text for the MPC Controller block, put the MPC block inside a subsystem block and treat the subsystem block as an atomic unit. Select the Treat as atomic unit property of the subsystem block.
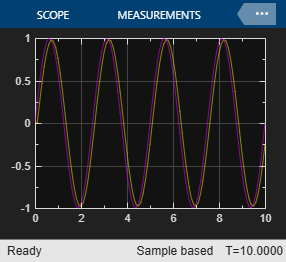
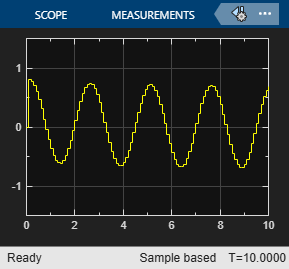
Simulate the model in Simulink.
close_system([mdl '/Control System/MPC Controller']) open_system([mdl '/Outputs//References']) open_system([mdl '/Inputs']) sim(mdl)
-->Converting model to discrete time. -->Integrator added as output disturbance model for measured output #1. -->"Model.Noise" is empty. Assuming white noise on each measured output.
To generate code by using the Simulink PLC Coder, use the plcgeneratecode command.
plcgeneratecode([mdl '/Control System']);
Close the Simulink model and return to the original directory.
bdclose(mdl)