step
System object: phased.RangeDopplerResponse
Namespace: phased
Calculate range-Doppler response
Syntax
Description
Note
Starting in R2016b, instead of using the step method
to perform the operation defined by the System object™, you can
call the object with arguments, as if it were a function. For example, y
= step(obj,x) and y = obj(x) perform
equivalent operations.
[ calculates
the range-Doppler response of the input signal, resp,rnggrid,dopgrid]
= step(H,x)x. resp is
the complex range-Doppler response. rnggrid and dopgrid provide
the range samples and Doppler samples, respectively, at which the
range-Doppler response is evaluated. This syntax is available when
you set the RangeMethod property to 'FFT' and
the DechirpInput property to false.
This syntax is most commonly used with FMCW signals.
[ uses resp,rnggrid,dopgrid]
= step(H,x,xref)xref as
the reference signal to dechirp x. This syntax
is available when you set the RangeMethod property
to 'FFT' and the DechirpInput property
to true. This syntax is most commonly used with
FMCW signals, where the reference signal is typically the transmitted
signal.
Note
The object performs an initialization the first time the object is executed. This
initialization locks nontunable properties
and input specifications, such as dimensions, complexity, and data type of the input data.
If you change a nontunable property or an input specification, the System object issues an error. To change nontunable properties or inputs, you must first
call the release method to unlock the object.
Input Arguments
| Range-Doppler response System object |
| Input data, specified as a complex-valued K-by-L matrix or K-by-N-by-L array where
Specific requirements depend on the syntax:
In the case of an FMCW waveform with a triangle sweep, the sweeps
alternate between positive and negative slopes. However,
You can specify this argument as single or double precision. |
| Reference signal, specified as a column vector having the same number of rows as
|
| Matched filter coefficients, specified as a column vector. You can specify this argument as single or double precision. |
| Pulse repetition frequency, specified as a positive scalar. To enable this argument, set the |
Output Arguments
| Range-Doppler response of
| ||||||||
| Range samples at which the range-Doppler response is evaluated. | ||||||||
| Doppler samples or speed samples at which the range-Doppler
response is evaluated. |
Examples
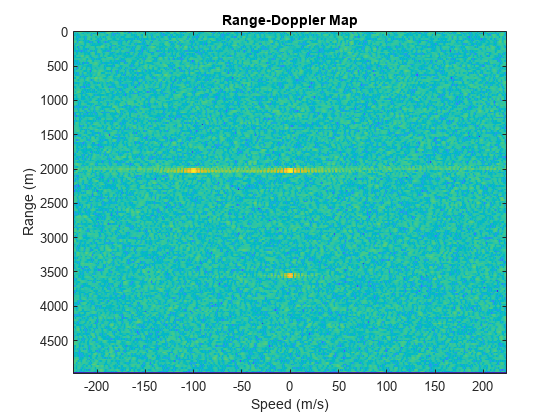
Compute the range-doppler response of a pulsed radar signal using a matched filter.
Load data for a pulsed radar signal. The signal includes three target returns. Two targets are approximately 2000 m away, while the third is approximately 3500 m away. In addition, two of the targets are stationary relative to the radar. The third is moving away from the radar at about 100 m/s.
load RangeDopplerExampleData;Create a range-Doppler response object.
response = phased.RangeDopplerResponse('DopplerFFTLengthSource','Property', ... 'DopplerFFTLength',RangeDopplerEx_MF_NFFTDOP, ... 'SampleRate',RangeDopplerEx_MF_Fs,'DopplerOutput','Speed', ... 'OperatingFrequency',RangeDopplerEx_MF_Fc);
Calculate the range-Doppler response.
[resp,rng_grid,dop_grid] = response(RangeDopplerEx_MF_X, ...
RangeDopplerEx_MF_Coeff);Plot the range-Doppler response.
imagesc(dop_grid,rng_grid,mag2db(abs(resp))); xlabel('Speed (m/s)'); ylabel('Range (m)'); title('Range-Doppler Map');
Estimate the Doppler and range values of a single target from the range-Doppler response.
Load data for an FMCW signal that has not yet been dechirped. The signal contains the return from one target.
load RangeDopplerExampleData;Create a range-Doppler response object.
hrdresp = phased.RangeDopplerResponse(... 'RangeMethod','FFT',... 'PropagationSpeed',RangeDopplerEx_Dechirp_PropSpeed,... 'SampleRate',RangeDopplerEx_Dechirp_Fs,... 'DechirpInput',true,... 'SweepSlope',RangeDopplerEx_Dechirp_SweepSlope);
Obtain the range-Doppler response data.
[resp,rng_grid,dop_grid] = step(hrdresp,...
RangeDopplerEx_Dechirp_X,RangeDopplerEx_Dechirp_Xref);Estimate the range and Doppler by finding the location of the maximum response.
[x_temp,idx_temp] = max(abs(resp)); [~,dop_idx] = max(x_temp); rng_idx = idx_temp(dop_idx); dop_est = dop_grid(dop_idx)
dop_est = -712.8906
rng_est = rng_grid(rng_idx)
rng_est = 2250
The target is approximately 2250 meters away, and is moving fast enough to cause a Doppler shift of approximately -713 Hz.