상미분 방정식(ODE) 피팅하기
이 예제에서는 두 가지 방식으로 ODE의 파라미터를 데이터에 피팅하는 방법을 보여줍니다. 첫 번째 방법에서는 초기 파라미터에 민감하게 의존하는 유명한 ODE인 로렌츠 연립방정식의 해 중 일부에 대한 등속 원형 경로의 직관적인 피팅을 보여줍니다. 두 번째 방법에서는 등속 원형 경로를 피팅하기 위해 로렌츠 방정식의 파라미터를 수정하는 방법을 보여줍니다. 응용 사례에 적합한 접근법을 모델로 삼아 미분 방정식을 데이터에 피팅할 수 있습니다.
로렌츠 방정식: 정의 및 수치 해
로렌츠 연립방정식은 연립상미분방정식입니다(로렌츠 방정식 참조). 실수 상수 에 대해 연립방정식은 다음과 같습니다.
어떤 민감한 연립방정식에 대한 파라미터의 로렌츠 값이 입니다. [x(0),y(0),z(0)] = [10,20,10]에서 시작해 시간 0부터 100까지 연립방정식의 전개를 살펴봅니다.
sigma = 10;
beta = 8/3;
rho = 28;
f = @(t,a) [-sigma*a(1) + sigma*a(2); rho*a(1) - a(2) - a(1)*a(3); -beta*a(3) + a(1)*a(2)];
xt0 = [10,20,10];
[tspan,a] = ode45(f,[0 100],xt0); % Runge-Kutta 4th/5th order ODE solver
figure
plot3(a(:,1),a(:,2),a(:,3))
view([-10.0 -2.0])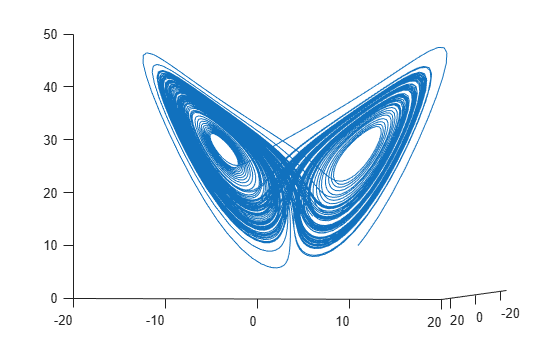
전개 양상이 매우 복잡합니다. 하지만 짧은 시간 간격에서는 균일한 원을 그리는 것처럼 보입니다. 시간 간격 [0,1/10]에 대해 해를 플로팅합니다.
[tspan,a] = ode45(f,[0 1/10],xt0); % Runge-Kutta 4th/5th order ODE solver
figure
plot3(a(:,1),a(:,2),a(:,3))
view([-30 -70])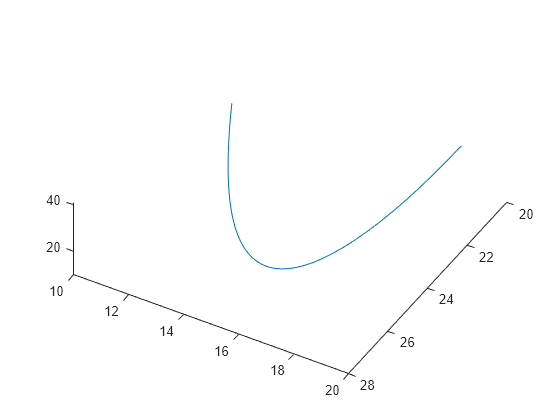
ODE 해에 원형 경로 피팅하기
원형 경로의 방정식에는 다음과 같이 여러 개의 파라미터가 있습니다.
x-y 평면에서 경로의 각도
x축을 따라 기울어진 평면의 각도
반지름 R
속도 V
시간 0으로부터의 이동 t0
공간 delta에서의 3차원 이동
이러한 파라미터의 관점에서 시간 xdata에 대한 원형 경로의 위치를 결정하십시오.
function f = fitlorenzfn(x,xdata) theta = x(1:2); R = x(3); V = x(4); t0 = x(5); delta = x(6:8); f = zeros(length(xdata),3); f(:,3) = R*sin(theta(1))*sin(V*(xdata - t0)) + delta(3); f(:,1) = R*cos(V*(xdata - t0))*cos(theta(2)) ... - R*sin(V*(xdata - t0))*cos(theta(1))*sin(theta(2)) + delta(1); f(:,2) = R*sin(V*(xdata - t0))*cos(theta(1))*cos(theta(2)) ... - R*cos(V*(xdata - t0))*sin(theta(2)) + delta(2); end
ODE 해에 지정된 시간에 로렌츠 연립방정식에 대한 최적 피팅의 원형 경로를 찾으려면 lsqcurvefit을 사용하십시오. 다양한 파라미터들이 적절한 한계 내에 있도록 파라미터의 범위를 정하십시오.
lb = [-pi/2,-pi,5,-15,-pi,-40,-40,-40]; ub = [pi/2,pi,60,15,pi,40,40,40]; theta0 = [0;0]; R0 = 20; V0 = 1; t0 = 0; delta0 = zeros(3,1); x0 = [theta0;R0;V0;t0;delta0]; [xbest,resnorm,residual] = lsqcurvefit(@fitlorenzfn,x0,tspan,a,lb,ub);
Local minimum possible. lsqcurvefit stopped because the final change in the sum of squares relative to its initial value is less than the value of the function tolerance. <stopping criteria details>
ODE 해의 시간에 최적 피팅의 원형 점을 로렌츠 연립방정식의 해와 함께 플로팅합니다.
soln = a + residual; hold on plot3(soln(:,1),soln(:,2),soln(:,3),"r") legend("ODE Solution","Circular Arc") hold off
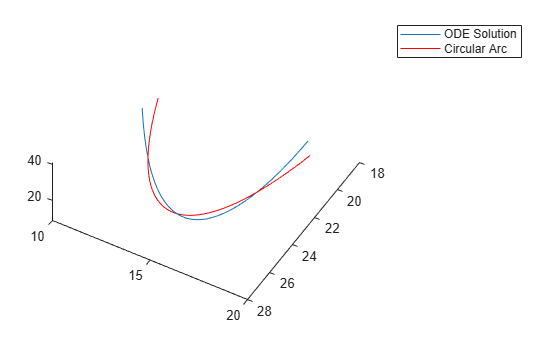
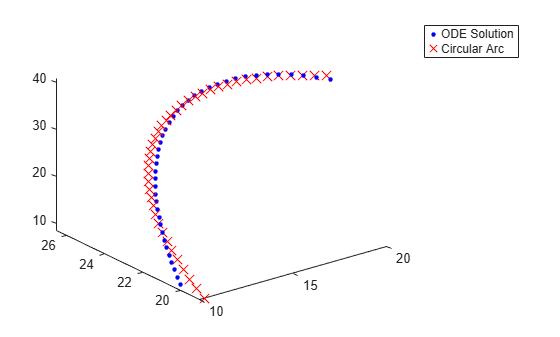
figure plot3(a(:,1),a(:,2),a(:,3),"b.",MarkerSize=10) hold on plot3(soln(:,1),soln(:,2),soln(:,3),"rx",MarkerSize=10) legend("ODE Solution","Circular Arc") hold off
원호에 ODE 피팅하기
이제 원호에 최적으로 피팅되도록 파라미터 를 수정합니다. 더 나은 피팅을 위해 초기점 [10,20,10]도 변경할 수 있도록 합니다.
그렇게 하려면 ODE 피팅의 파라미터를 받아 시간 t에서 궤적을 계산하는 함수 paramfun을 사용하십시오.
function pos = paramfun(x,tspan) sigma = x(1); beta = x(2); rho = x(3); xt0 = x(4:6); f = @(t,a) [-sigma*a(1) + sigma*a(2); rho*a(1) - a(2) - a(1)*a(3); -beta*a(3) + a(1)*a(2)]; [~,pos] = ode45(f,tspan,xt0); end
최적의 파라미터를 구하려면 lsqcurvefit을 사용하여 새로 계산된 ODE 궤적과 원호 soln 간의 차이를 최소화하십시오.
xt0 = zeros(1,6); xt0(1) = sigma; xt0(2) = beta; xt0(3) = rho; xt0(4:6) = soln(1,:); [pbest,presnorm,presidual,exitflag,output] = lsqcurvefit(@paramfun,xt0,tspan,soln);
Local minimum possible. lsqcurvefit stopped because the final change in the sum of squares relative to its initial value is less than the value of the function tolerance. <stopping criteria details>
이 최적화로 인해 파라미터가 얼마나 변경되었는지 확인합니다.
fprintf("New parameters: %f, %f, %f",pbest(1:3))New parameters: 9.132446, 2.854998, 27.937986
fprintf("Original parameters: %f, %f, %f",[sigma,beta,rho])Original parameters: 10.000000, 2.666667, 28.000000
파라미터 sigma와 beta가 약 10% 변경되었습니다.
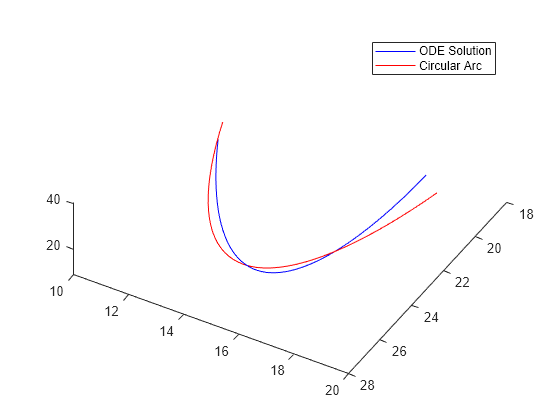
수정된 해를 플로팅합니다.
figure hold on odesl = presidual + soln; plot3(odesl(:,1),odesl(:,2),odesl(:,3),"b") plot3(soln(:,1),soln(:,2),soln(:,3),"r") legend("ODE Solution","Circular Arc") view([-30 -70]) hold off
ODE 피팅의 문제
시뮬레이션 또는 상미분 방정식 최적화하기에서 설명한 바와 같이, 최적화 함수는 수치 ODE 해의 고유한 잡음으로 인해 문제가 있을 수 있습니다. 종료 메시지나 종료 플래그가 잠재적 부정확성을 나타낼 수 있으므로 해가 이상적이지 않다는 의심이 들면 유한 차분을 변경해 보십시오. 이 예제에서 더 큰 유한 차분 스텝 크기와 중심 유한 차분을 사용해 봅니다.
options = optimoptions("lsqcurvefit",FiniteDifferenceStepSize=1e-4,... FiniteDifferenceType="central"); [pbest2,presnorm2,presidual2,exitflag2,output2] = ... lsqcurvefit(@paramfun,xt0,tspan,soln,[],[],options);
Local minimum possible. lsqcurvefit stopped because the final change in the sum of squares relative to its initial value is less than the value of the function tolerance. <stopping criteria details>
이 경우에는 이러한 유한 차분 옵션을 사용해도 해가 개선되지는 않습니다.
disp([presnorm,presnorm2])
20.0637 20.0637