이 페이지는 기계 번역을 사용하여 번역되었습니다. 영어 원문을 보려면 여기를 클릭하십시오.
TCP/IP 클라이언트와 Arduino 서버 간 통신 차단
이 예제는 원격 서버와 함께 TCP/IP Send 및 TCP/IP Receive 블록을 사용하는 방법을 보여줍니다. 이 예시에서 서버는 네트워크에 연결된 Arduino®에서 실행됩니다. TCP/IP 블록은 클라이언트 전용 블록입니다. TCP/IP 전송 및 TCP/IP Receive 블록은 모두 원격으로 실행 중인 서버, 다른 MATLAB® 세션의 서버, 또는 동일 머신상의 에코 서버와 통신할 수 있습니다.
이 예시에서 두 모델은 다음과 같은 점을 보여줍니다.
트리거 발생 후 서버로부터의 지속적인 데이터 스트림.
서버에 명령 메시지를 전송한 후 서버로부터 요청 시 읽기.
설정
예제가 제공하는 INO 파일을 Arduino Uno에 로드하고, INO 파일에 명시된 IP 및 포트 설정으로 네트워크 연결을 구성해야 합니다. 이 예제를 실행하면 예제와 연관된 두 모델이 모두 열립니다. 두 가지의 차이점을 더 잘 이해하고, 아두이노에서 실행 중인 서버와 통신할 때 TCP/IP 블록이 클라이언트 블록으로 어떻게 동작하는지 확인하기 위해 각각 하나씩 실행해 볼 수 있습니다.
서버로부터의 지속적인 데이터 흐름
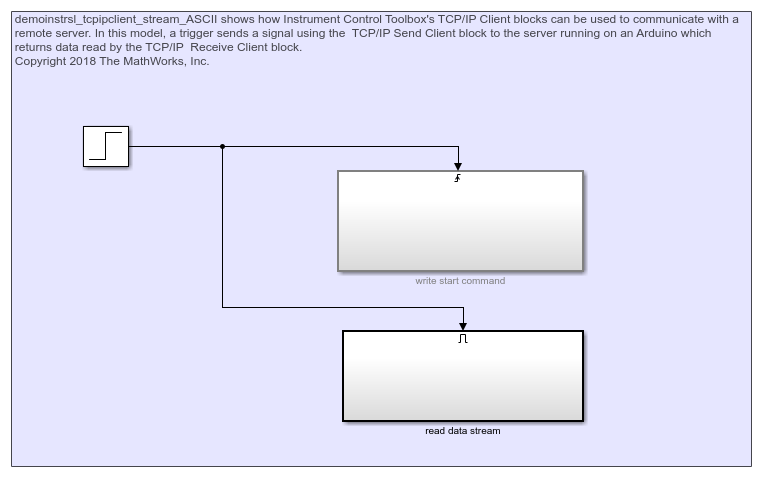
이 모델은 두 개의 서브시스템으로 구성됩니다.
시작 명령어 작성 — 트리거된 서브시스템으로, 첫 번째 시간 간격 트리거 발생 시 TCP/IP Send Client 블록을 사용하여 아두이노에서 실행 중인 서버에 시작 명령어를 전송합니다.
데이터 스트림 읽기 — TCP/IP 수신 클라이언트 블록을 사용하여 Arduino 서버에서 들어오는 데이터 스트림을 모든 시간 간격마다 지속적으로 읽는 트리거된 서브시스템입니다.
서버에서 온디맨드 읽기
이 모델은 TCP/IP 전송 클라이언트 블록을 사용하여 초기 전송 명령을 보내도록 설정되어 있습니다. 서버는 신호 수신을 확인하고 일부 데이터를 반송하며, 이 데이터는 TCP/IP 수신 클라이언트 블록에 의해 읽힙니다.

결과
이 예제는 아두이노의 아날로그 핀에 연결된 센서를 사용합니다. 부착된 센서 유형에 따라 해당 출력이 표시되어야 합니다.