LiDAR-Based Exploration of Unknown Indoor Space by a Robotic System
Deepak Agarwal, EbyT Technologies Pvt. Ltd.
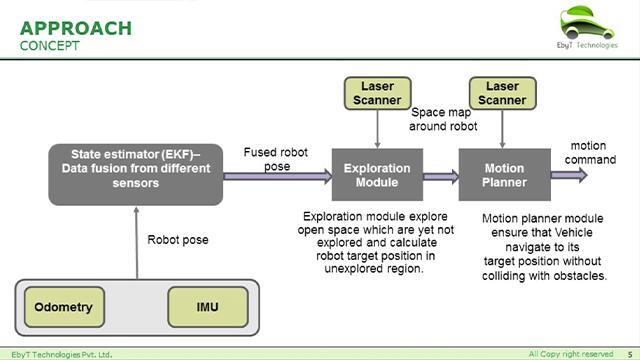
The exploration of unknown environments can be the fundamental problem for mobile robots, as it involves all the basic capabilities of such systems (e.g., perception, planning, localization, and navigation). From a practical viewpoint, exploration is a central task in many applications, such as planetary missions, intervention in hostile areas, and automatic map building.
This presentation focuses on technique known as frontier-based exploration. The rationale of this approach is that the robot must move towards the boundary (the frontier) between safe explored areas and unknown territory to maximize the information gain coming from new perceptions. The talk discusses how to explore indoor spaces in the absence of predefined map, how to navigate the space while avoiding static obstacles, and how to implement the exploration and navigation module in ROS in MATLAB® and simulate the virtual robot, Husky, in ROS gazebo using Robotics System Toolbox™.
Published: 30 Jun 2019

Featured Product
MATLAB
Up Next:


Related Videos:








웹사이트 선택
번역된 콘텐츠를 보고 지역별 이벤트와 혜택을 살펴보려면 웹사이트를 선택하십시오. 현재 계신 지역에 따라 다음 웹사이트를 권장합니다: United States
또한 다음 목록에서 웹사이트를 선택하실 수도 있습니다.
미주
- América Latina (Español)
- Canada (English)
- United States (English)
유럽
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)