Log Signals in MAT-File Format Using Raspberry Pi
This example shows you how to log signals from a Simulink® model on Raspberry Pi® hardware in the MAT-file format.
Introduction
Simulink Support Package for Raspberry Pi Hardware supports logging of signals from your Simulink model on Raspberry Pi hardware in the MAT-file format. Signal logging enables you to monitor the behavior of the signal and perform analysis of historical data.
Prerequisites
Before you start with this example, we recommend you to complete the Get Started with Simulink Support Package for Raspberry Pi Hardware example.
Required Hardware
To run this example, you must have a Raspberry Pi board.
Task 1: Open Simulink Model Template
The Simulink Support Package for Raspberry Pi Hardware provides different Simulink model templates. The models in these templates are pre-configured for you to use with Raspberry Pi hardware. You can use these models as a starting point to understand how the MAT-file logging works on Raspberry Pi hardware.
1. Open the Simulink Start Page.
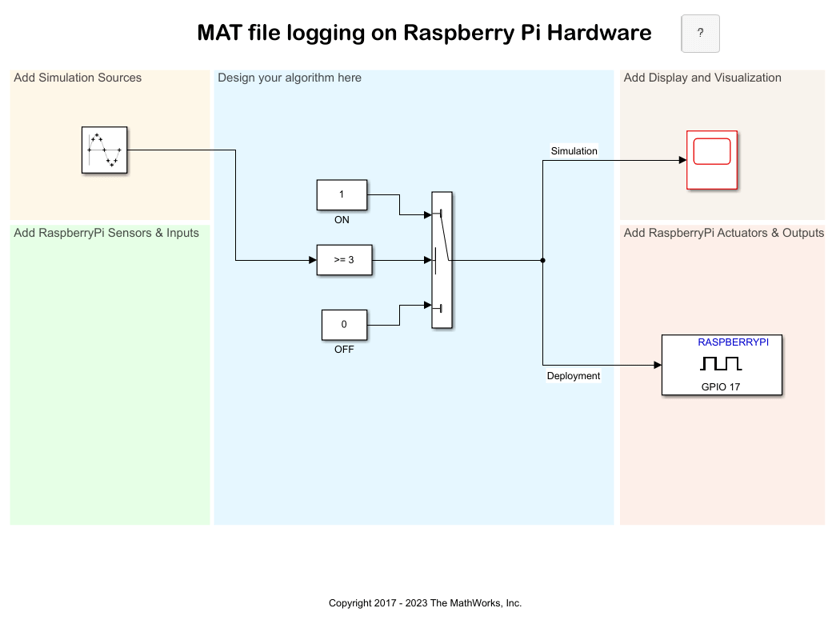
2. Scroll down and click the Simulink Support Package for Raspberry Pi Hardware template. From the expanded list, click Basic Model to create a new model. This model consists of a Sine Wave source block, a Scope block, and a GPIO block from the Raspberry Pi Simulink library. The Sine Wave block is connected to the Scope block and the GPIO block.
In this example, the signal driving the GPIO block is logged by the Scope block.
3. Save the model.
Task 2: Enable MAT-file Logging
1. On the Modeling tab, click Model Settings.
2. In the Configuration Parameters dialog box, type MAT-file logging in the search box.
3. Select the MAT-file logging option and click Apply to save the changes.
4. Click OK to close the dialog box.
5. In the Simulink model, double-click the Scope block, and click the gear icon to open the Configuration Properties dialog box.
6. On the Logging tab, select the Log data to workspace option, and click Apply to save the changes.
7. On the Simulink model toolbar, set the Simulation stop time parameter. This parameter specifies the duration for which the signals are logged. After the simulation stop time elapses, the logging of signals stops. However, your model continues to run. For example, if the Simulation stop time parameter is specified as 10.0 seconds, the signals are logged for 10.0 seconds, and then the logging stops. However, the model continues to run for indefinite time.
Task 3: Configure and Deploy Simulink Model on Raspberry Pi Hardware
In this task, you will configure the model to be deployed on the Raspberry Pi hardware. As we started with a Raspberry Pi template model, the model is already configured.
1. Open the pre-configured Simulink model that you saved in Task 1.
2. On the Hardware tab of the Simulink model, click Hardware Settings. In the Configuration Parameters dialog box, verify the parameter values in the Hardware Implementation pane.
3. On the Hardware tab of the Simulink model, in the Mode section, select Run on board and then click Build, Deploy & Start. This action builds, downloads, and runs the Simulink model on the Raspberry Pi hardware.
Task 4: Import MAT-files from Raspberry Pi Hardware
1. In the MATLAB® command window, use the following command to create a raspberrypi object. The parameters specified in this command should match the board parameters specified in Simulation> Model Configuration Parameters> Target hardware resources> Board Parameters.
r = raspberrypi(IP address, username, password);
2. Use the getFile function to copy the MAT-files from the Raspberry Pi board to your computer.
getFile(r, filename)
Here, r specifies the raspberrypi object and filename specifies the path and name of the file created.
The model running on Raspberry Pi creates multiple MAT-files depending on the duration for which the signals are logged. The files are named as 'modelname_runindex_fileindex.mat'. 'modelname' is the name with which the Simulink model is saved. 'runindex' starts with 1 and is incremented by one during successive runs.fileindex starts with 1 and is incremented by 1 every time a new MAT file is created in the same run.
To import multiple MAT-files from Raspberry Pi into MATLAB, use the following function in the MATLAB command window:
getFile(r,modelname*.mat)
The '*' character is used to copy all the files having names starting with 'modelname' and ending with '.mat'.
After importing the MAT-files, you can use it like a regular MAT-file for any further analysis in MATLAB.
Since the model running on the hardware creates multiple MAT-files, the logged data points are distributed across the generated MAT-files.
You can create a stitcher function to combine these MAT-files into a single MAT-file that contains all the logged data points. An example of the MAT-file stitcher is provided. In the MATLAB command window, enter the following command and refer the file to know more about its usage.
edit('Raspberrypi_MAT_stitcher.m');
Other Things to Try
In this example, a Scope block is used to log signals. The signals can also be logged using the To Workspace block or the Output port block.
Try logging signals using these two blocks.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)