이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
HIL을 위해 구성된 전기차
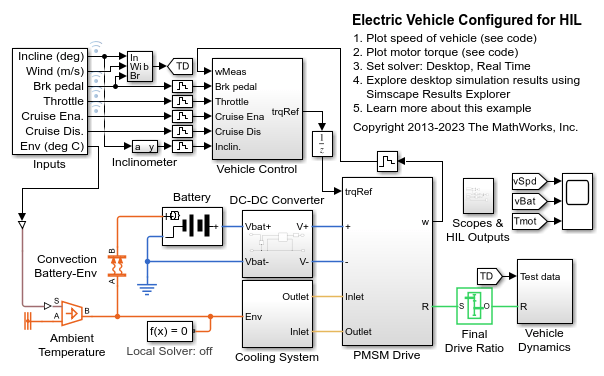
이 예제에서는 전기차를 모델링하는 방법을 보여줍니다. HIL(Hardware-In-the-Loop) 배포에 이 모델을 사용할 수 있습니다. 에너지 기반 모델링은 고주파 스위칭을 방지하고 솔버는 고정 스텝 시뮬레이션을 구현합니다.
테스트 주행은 차량이 경사면을 일정한 속도로 오르도록 가속된 후, 내려오는 동안에는 전력이 배터리로 돌아가는 과정을 보여 줍니다.
모델
PMSM Drive 서브시스템

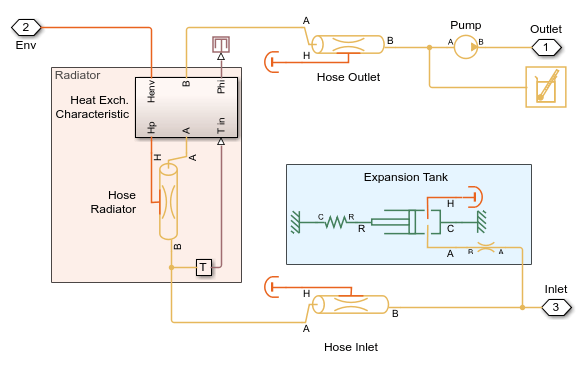
Cooling System 서브시스템
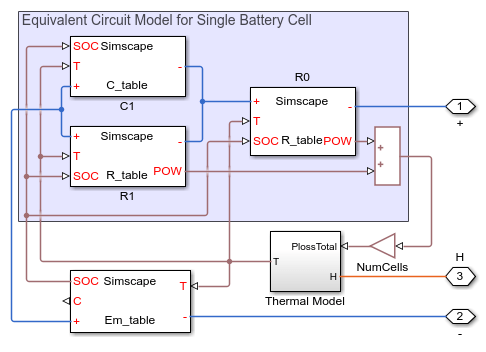
Electric and Thermal Model 서브시스템
Vehicle Control 서브시스템

데스크탑에서 Simscape 기록의 시뮬레이션 결과
아래 플롯은 운전자의 입력과 환경 조건에 따른 전기차의 동작을 보여줍니다. 차량은 운전자가 크루즈 컨트롤을 활성화할 때까지 가속됩니다. 그리고 도로의 경사도가 바뀌어도 속도를 유지합니다. 운전자가 브레이크를 걸면 차량 속도는 0이 될 때까지 낮아집니다.

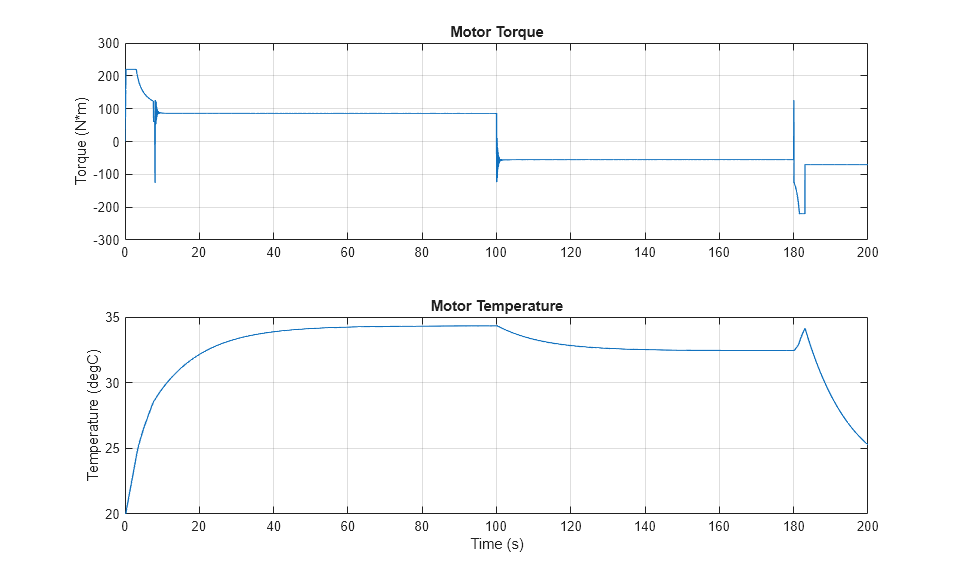
아래 플롯은 전기차의 PMSM 모터에 의해 생성되는 토크와 이 모터의 온도를 보여줍니다. 시뮬레이션의 전반부 동안 모터는 차량을 명령된 속도까지 가속한 후 토크를 계속 가하여 경사로에서 차량을 밀어 올립니다. 시뮬레이션의 후반부 동안 모터는 모터 토크의 부호 변화에서 볼 수 있듯이 발전기 역할을 합니다.
실시간 시뮬레이션의 결과
이 예제는 Intel® 3.5 GHz i7 멀티코어 CPU가 탑재된 Speedgoat Performance 실시간 타깃 머신에서 테스트되었습니다. 이 모델은 실시간으로 400마이크로초의 스텝 크기로 실행할 수 있습니다.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)