Industrial Machinery
Lifting, positioning, and mechanical power transmission
equipment
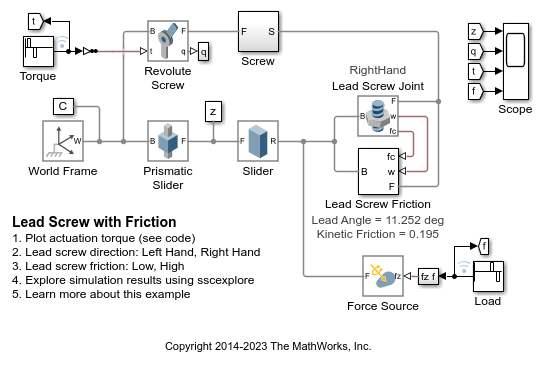
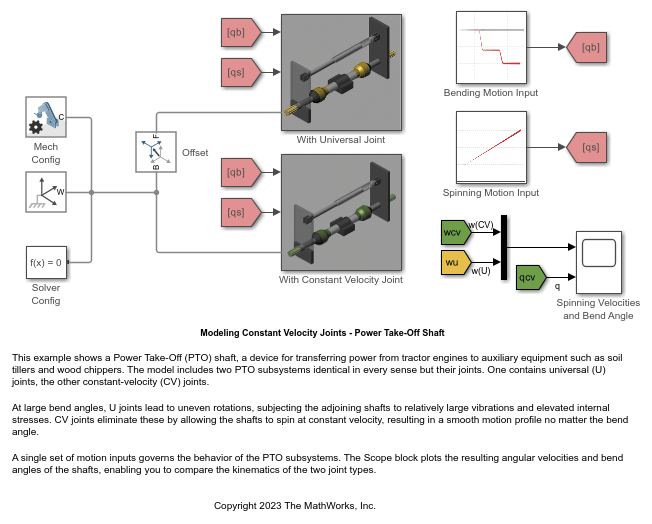
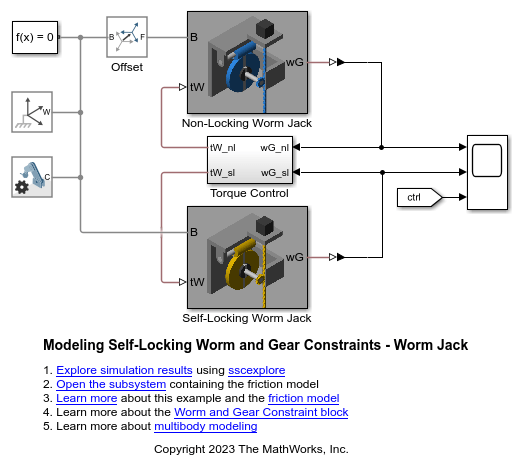
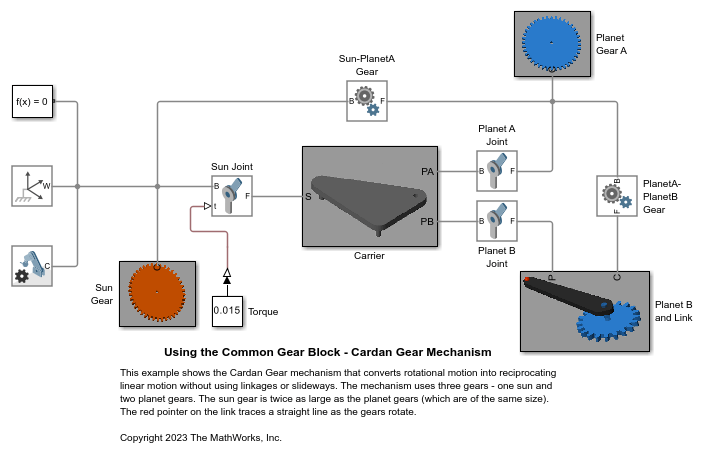
Simscape™ Multibody™ provides tools to model and analyze the dynamic behavior of industrial machinery. This includes studying the effects of different design decisions on machinery performance, such as efficiency, stability, and speed.
Featured Examples









You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)