hinfnorm
H∞ norm of dynamic system
Description
ninf = hinfnorm(sys)sys.
If
sysis a stable SISO system, then the H∞ norm is the peak gain, the largest value of the frequency response magnitude.If
sysis a stable MIMO system, then the H∞ norm is the largest singular value across frequencies.If
sysis an unstable system, then the H∞ norm is defined asInf.If
sysis a model that has tunable or uncertain parameters, thenhinfnormevaluates the H∞ norm at the current or nominal value ofsys.If is a model array, then
hinfnormreturns an array of the same size assys, whereninf(k) = hinfnorm(sys(:,:,k)).
For stable systems, hinfnorm(sys) is the
same as getPeakGain(sys).
Examples
Norm of MIMO System
Compute the norm of the following 2-input, 2-output dynamic system and the frequency at which the peak singular value occurs.
G = [0 tf([3 0],[1 1 10]);tf([1 1],[1 5]),tf(2,[1 6])]; [ninf,fpeak] = hinfnorm(G)
ninf = 3.0150
fpeak = 3.1623
The norm of a MIMO system is its maximum singular value. Plot the singular values of G and compare the result from hinfnorm.
sigma(G),grid
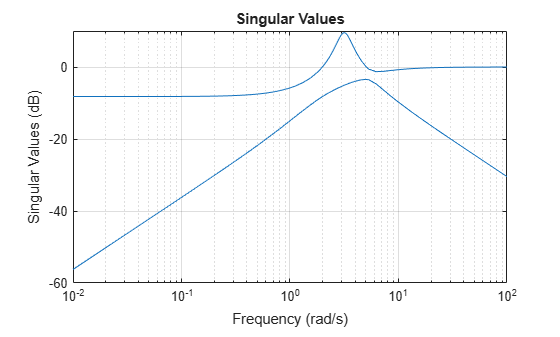
The values ninf and fpeak are consistent with the singular value plot, which displays the values in dB.
Input Arguments
Output Arguments
Version History
Introduced in R2013b
See Also
getPeakGain | freqresp | sigma | norm
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)