bicycleKinematics
Description
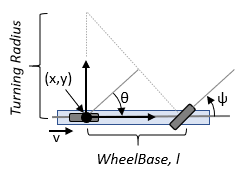
bicycleKinematics creates a bicycle vehicle model to simulate simplified
car-like vehicle dynamics. This model represents a vehicle with two axles separated by a
distance, WheelBase. The
state of the vehicle is defined as a three-element vector, [x
y
theta], with a global xy-position, specified in meters,
and a vehicle heading angle, theta, specified in radians. The front wheel
can be turned with steering angle psi. The vehicle heading,
theta, is defined at the center of the rear axle. To compute the time
derivative states of the model, use the derivative
function with input commands and the current robot state.
Creation
Description
kinematicModel = bicycleKinematics
kinematicModel = bicycleKinematics(Name,Value)
Properties
Object Functions
derivative | Time derivative of vehicle state |
Examples
Plot Path of Bicycle Kinematic Robot
Create a Robot
Define a robot and set the initial starting position and orientation.
kinematicModel = bicycleKinematics; initialState = [0 0 0];
Simulate Robot Motion
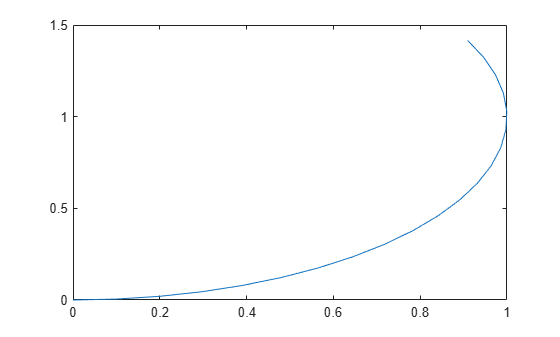
Set the timespan of the simulation to 1 s with 0.05 s time steps and the input commands to 2 m/s for the vehicle speed and pi/4 rad for the steering angle to create a left turn. Simulate the motion of the robot by using the ode45 solver on the derivative function.
tspan = 0:0.05:1;
inputs = [2 pi/4]; %Turn left
[t,y] = ode45(@(t,y)derivative(kinematicModel,y,inputs),tspan,initialState);Plot path
figure plot(y(:,1),y(:,2))
References
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control 1st ed. Cambridge, MA: Cambridge University Press, 2017.
[2] Corke, Peter I. Robotics, Vision and Control: Fundamental Algorithms in MATLAB. Springer, 2011.
Extended Capabilities
Version History
Introduced in R2019b
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)