이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
영구 자석 동기 발전기 배터리 충전
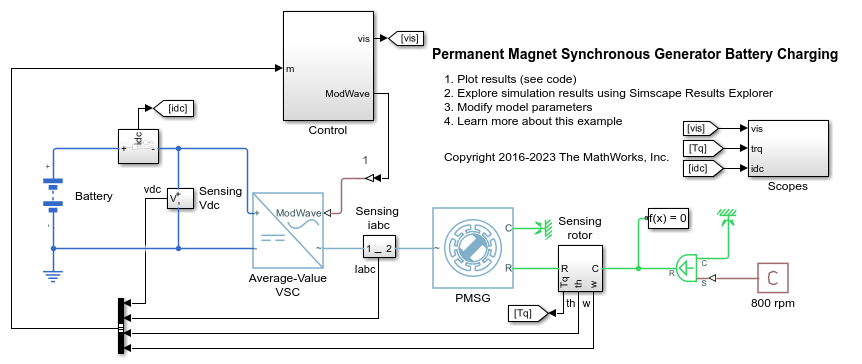
이 예제에서는 배터리를 충전하기 위해 영구 자석 동기 발전기(PMSG)를 사용하는 방법을 보여줍니다. 이상적 각속도 소스는 회전자 속도를 일정하게 유지하는 데 사용됩니다. Control 서브시스템은 자속 기준 제어를 사용하여 PMSG의 토크를 조정합니다. 토크 기준은 dc 링크 전압의 함수로 얻어집니다. 초기 배터리 충전 상태는 25%입니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다.
모델
Simscape 기록의 시뮬레이션 결과
아래 플롯은 발전기 토크, 배터리 전압, 충전 상태를 보여줍니다.

실시간 시뮬레이션의 결과
이 예제는 Intel® 3.5 GHz i7 멀티코어 CPU가 탑재된 Speedgoat Performance 실시간 타깃 머신에서 테스트되었습니다. 이 모델은 실시간으로 50마이크로초의 스텝 크기로 실행할 수 있습니다.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)