이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
IPMSM 속도 제어
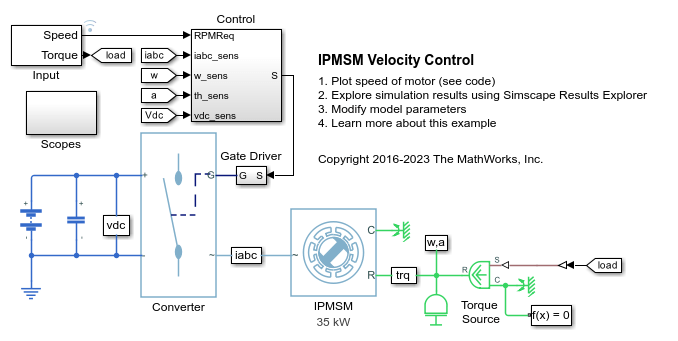
이 예제에서는 매립형 영구 자석 동기기(IPMSM) 기반의 자동차 전기-견인 드라이브의 회전자 각속도를 제어하는 방법을 보여줍니다. 고전압 배터리가 제어된 3상 컨버터를 통해 IPMSM에 전력을 공급합니다. IPMSM은 부하에 따라 모터 모드와 발전기 모드 모두에서 작동합니다. 이상적 토크 소스가 부하를 제공합니다. Scopes 서브시스템은 시뮬레이션 결과를 확인할 수 있는 스코프를 포함합니다. Control 서브시스템은 바깥쪽의 각속도 제어 루프 1개와 안쪽의 전류 제어 루프 2개를 갖는 멀티레이트 PI 기반 캐스케이드 제어 구조를 포함합니다. Control 서브시스템의 작업 스케줄링은 Stateflow® 상태 머신으로 구현됩니다. 1초의 시뮬레이션 중에 각속도 요구량은 0rpm, 500rpm, 2000rpm, 그런 다음 3000rpm입니다.
모델
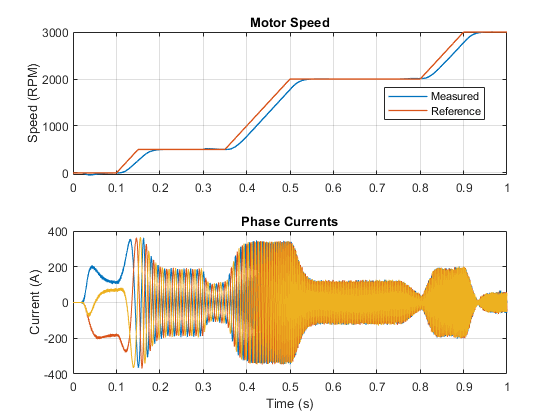
Simscape 기록의 시뮬레이션 결과
아래 플롯은 테스트에서 요청된 속도와 그 측정값을 전기 드라이브의 위상 전류와 함께 보여줍니다.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)