hough
허프 변환(Hough Transform)
설명
[는 이진 영상 H,theta,rho] = hough(BW)BW의 표준 허프 변환(SHT)을 계산합니다. hough 함수는 선을 검출하도록 고안되었습니다. 이 함수는 직선에 대한 파라미터 표현 rho = x*cos(theta) + y*sin(theta)를 사용합니다. 이 함수는 원점에서 직선에 수직인 벡터 상의 직선 거리 rho와 x축과 이 벡터 사이의 각도(단위: 도)인 theta를 반환합니다. 이 함수는 또한 SHT H를 반환합니다. 이는 행과 열이 각각 rho 값과 theta 값에 해당하는 파라미터 공간 행렬입니다. 자세한 내용은 알고리즘 항목을 참조하십시오.
예제
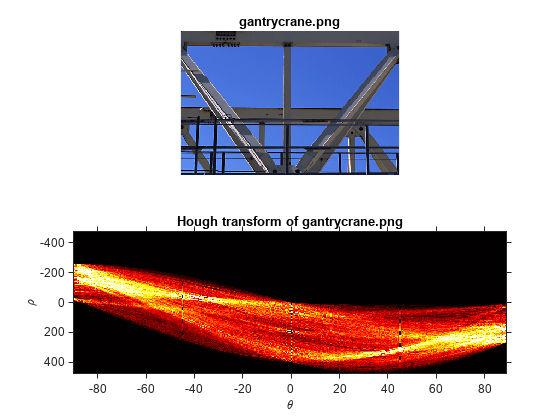
허프 변환 계산 후 표시하기
영상을 읽어 들인 후 회색조 영상으로 변환합니다.
RGB = imread('gantrycrane.png');
I = im2gray(RGB);경계를 추출합니다.
BW = edge(I,'canny');허프 변환을 계산합니다.
[H,T,R] = hough(BW,'RhoResolution',0.5,'Theta',-90:0.5:89);
원본 영상과 허프 행렬을 표시합니다.
subplot(2,1,1); imshow(RGB); title('gantrycrane.png'); subplot(2,1,2); imshow(imadjust(rescale(H)),'XData',T,'YData',R,... 'InitialMagnification','fit'); title('Hough transform of gantrycrane.png'); xlabel('\theta'), ylabel('\rho'); axis on, axis normal, hold on; colormap(gca,hot);
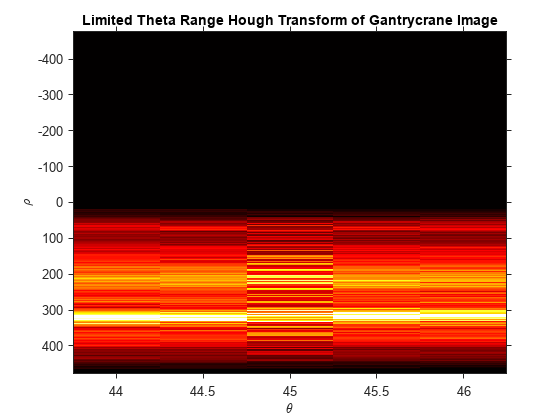
제한된 세타 범위에 대해 허프 변환 계산하기
영상을 읽어 들인 후 회색조 영상으로 변환합니다.
RGB = imread('gantrycrane.png');
I = im2gray(RGB);경계를 추출합니다.
BW = edge(I,'canny');제한된 각도 범위에 대해 허프 변환을 계산합니다.
[H,T,R] = hough(BW,'Theta',44:0.5:46);허프 변환을 표시합니다.
figure imshow(imadjust(rescale(H)),'XData',T,'YData',R,... 'InitialMagnification','fit'); title('Limited Theta Range Hough Transform of Gantrycrane Image'); xlabel('\theta') ylabel('\rho'); axis on, axis normal; colormap(gca,hot)
입력 인수
출력 인수
알고리즘
표준 허프 변환(SHT)은 다음과 같은 직선에 대한 파라미터 표현을 사용합니다.
rho = x*cos(theta) + y*sin(theta)
좌표계의 원점은 왼쪽 위 코너 픽셀의 중심에 있다고 가정합니다.
변수 rho는 원점에서 직선까지의 수직 거리입니다.
변수 theta는 원점에서 직선까지의 법선과 양의 x축 사이를 시계 방향으로 측정(단위: 도)한 각입니다. theta의 범위는 –90° ≤ θ < 90°입니다. 직선 자체의 각도는 θ + 90°이며, 이 또한 양의 x축을 기준으로 시계 방향으로 측정됩니다.

SHT는 파라미터 공간 행렬이며, 행과 열은 각각 rho 값과 theta 값에 해당합니다. SHT의 요소는 누산기 셀을 나타냅니다. 처음에 각 셀의 값은 0입니다. 그런 다음, 영상에서 배경이 아닌 모든 점에서 rho가 모든 theta에 대해 계산됩니다. rho는 SHT에서 가장 가까운 허용된 행으로 반올림됩니다. 이 누산기 셀은 증분됩니다. 이 절차가 끝날 때, SHT(r,c)의 Q 값은 xy 평면에 있는 theta(c)와 rho(r)로 지정된 직선 위에 Q개의 점이 있음을 의미합니다. SHT의 피크 값은 입력 영상의 잠재적인 직선을 나타냅니다.
허프 변환 행렬 H는 nrho×ntheta입니다. 여기서,
nrho = 2*(ceil(D/RhoResolution)) + 1이고
D = sqrt((numRowsInBW - 1)^2 + (numColsInBW - 1)^2)입니다.
rho 값의 범위는 -diagonal에서 diagonal까지입니다. 여기서
diagonal = RhoResolution*ceil(D/RhoResolution)입니다.
ntheta = length(theta)
확장 기능
버전 내역
R2006a 이전에 개발됨You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)