getDelayModel
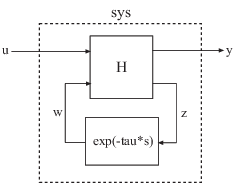
State-space representation of internal delays
Description
[ returns the set of state-space matrices
and internal delay vector that explicitly describe the state-space model
A,B1,B2,C1,C2,D11,D12,D21,D22,E,tau]
= getDelayModel(sys)sys.
Examples
Get Delay-Free State-Space Model and Internal Delay
Decompose the following closed-loop system with internal delay into a delay-free component and a component representing the internal delay.
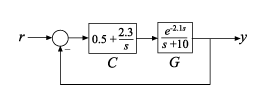
Create the closed-loop model sys from r to y.
G = tf(1,[1 10],'InputDelay',2.1);
C = pid(0.5,2.3);
sys = feedback(C*G,1);sys is a state-space (ss) model with an internal delay that arises from closing the feedback loop on a plant with an input delay.
Decompose sys into a delay-free state-space model and the value of the internal delay.
[H,tau] = getDelayModel(sys);
Confirm that the internal delay matches the original input delay on the plant.
tau
tau = 2.1000
Input Arguments
Output Arguments
Version History
Introduced in R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)