getPassiveIndex
Compute passivity index of linear system
Syntax
Description
getPassiveIndex computes various measures of the excess
or shortage of passivity for a given system.
A linear system G(s) is passive if all its I/O trajectories (u(t),y(t)) satisfy:
for all T > 0. Equivalently, a system is passive if its frequency response is positive real, such that for all ω > 0,
(or the discrete-time equivalent).
R = getPassiveIndex(G)G is passive
when R is less than one. R
measures the relative excess (R < 1) or shortage
(R > 1) of passivity.
For more information about the notion of passivity indices, see About Passivity and Passivity Indices.
nu = getPassiveIndex(G,'input')nu > 0.
nu is also called the input feedforward passivity
(IFP) index. The value of nu is the minimum
feedforward action such that the resulting system is passive.
For more information about the notion of passivity indices, see About Passivity and Passivity Indices.
rho = getPassiveIndex(G,'output')rho > 0.
rho is also called the output feedback passivity
(OFP) index. The value of rho is the minimum feedback
action such that the resulting system is passive.
For more information about the notion of passivity indices, see About Passivity and Passivity Indices.
tau = getPassiveIndex(G,'io')tau >
0.
For more information about the notion of passivity indices, see About Passivity and Passivity Indices.
[index,
also returns the frequency at which the returned index value is
achieved.FI] = getPassiveIndex(___)
Examples
Relative, Input, and Output Passivity Indices
Compute passivity indices for the following dynamic system:
G = tf([1,1,5,.1],[1,2,3,4]);
Compute the relative passivity index.
R = getPassiveIndex(G)
R = 0.9512
The system is passive, but with a relatively small excess of passivity.
Compute the input and output passivity indices.
nu = getPassiveIndex(G,'input')nu = 0.0250
rho = getPassiveIndex(G,'output')rho = 0.2583
This system is both input strictly passive and output strictly passive.
Compute the combined I/O passivity index.
tau = getPassiveIndex(G,'io')tau = 0.0250
The system is very strictly passive as well. A system that is very strictly passive is also strictly positive real. Examining the Nyquist plot confirms this, showing that the frequency response lies entirely within the right half-plane.
nyquistplot(G)
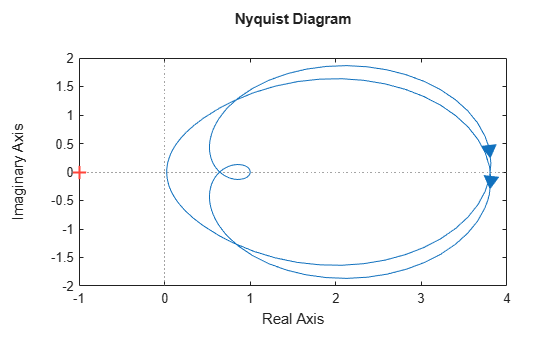
The relatively small tau value is reflected in how close the frequency response comes to the imaginary axis.
Relative Passivity Index and Frequency for Systems with Complex Coefficients
For systems with complex coefficients, getPassiveIndex can return indices at a negative or positive frequency depending on the fband you specify.
Load the state-space model with complex data.
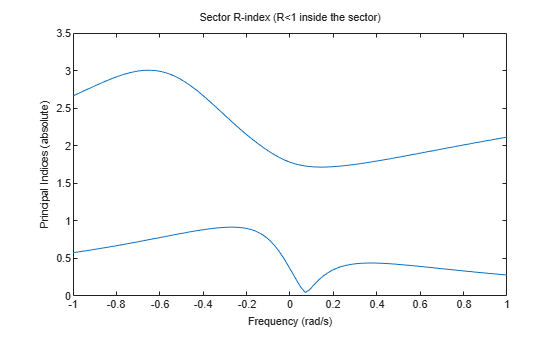
load compCoeffModel.matCompute the relative passivity index and its frequency with a relative accuracy of 0.0001%. Also, specify fband = [0.1,1] to compute the index in the frequency interval [–1,–0.1] ∪ [0.1,1].
[R,FI] = getPassiveIndex(sys,1e-6,[0.1,1])
R = 3.0050
FI = -0.6518
In this interval, sys achieves a relative passivity index of 3.0050 at a negative frequency value of –0.6518 rad/s. Use passiveplot to plot the indices in this range.
opt = sectorplotoptions; opt.FreqScale = 'Linear'; opt.IndexScale = 'Linear'; w = linspace(-1,1,100); passiveplot(sys,w,opt)
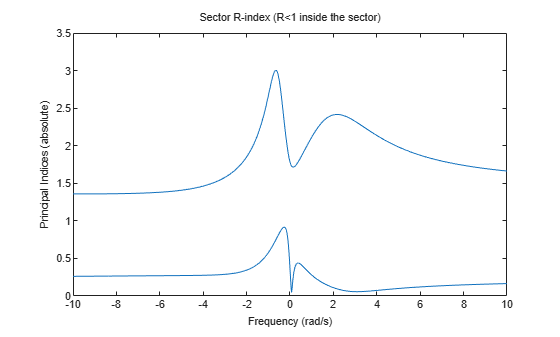
Now compute the relative passivity index in the frequency interval [–10,–1.5] ∪ [1.5,10]. To do so, specify fband = [1.5,10].
[R,FI] = getPassiveIndex(sys,1e-6,[1.5,10])
R = 2.4162
FI = 2.1707
In this interval, sys achieves a relative passivity index of 2.4162 at a positive frequency value of 2.1707 rad/s. Plot the indices in this range to confirm the result.
w = linspace(-10,10,1000); passiveplot(sys,w,opt)
Input Arguments
Output Arguments
Limitations
getPassiveIndex(G,'output')might return incorrect results when one of the following conditions occurs:G^-1is improper, that is, has infinite gain ats = Inforz = Inf.G^-1has poles on the imaginary axis (for continuous-timeG) or on the unit circle (for discrete-timeG).
To circumvent this limitation, perturb
Gto have as many zeros as poles and only stable zeros. In the following example,getPassiveIndexinitially returns an incorrect answer forG.G = tf([1 0],[1 0.2 1]); [rho,freq] = getPassiveIndex(G,'output')Perturb
Gsuch that it is bi-proper and has stable zeros.getPassiveIndexthen returns the expected answer.zpk(G+1e-4) [rho,freq] = getPassiveIndex(G+1e-4,'output');
References
[1] Xia, M., P. Gahinet, N. Abroug, C. Buhr, and E. Laroche. “Sector Bounds in Stability Analysis and Control Design.” International Journal of Robust and Nonlinear Control 30, no. 18 (December 2020): 7857–82. https://doi.org/10.1002/rnc.5236.
Version History
Introduced in R2016a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)