이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
feedback
여러 모델의 피드백 연결
구문
설명
예제
단위 피드백을 갖는 제어기와 플랜트
pendulumModelAndController.mat에는 SISO 역진자 전달 함수 모델 G 및 그와 관련된 PID 제어기 C가 포함되어 있습니다.
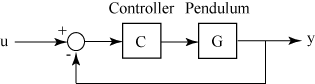
역진자와 제어기 모델을 작업 공간으로 불러옵니다.
load('pendulumModelAndController','G','C'); size(G)
Transfer function with 1 outputs and 1 inputs.
size(C)
PID controller with 1 output and 1 input.
feedback을 사용하여 G와 C로 음의 피드백 루프를 만듭니다.
sys = feedback(G*C,1)
sys =
1.307e-06 s^3 + 3.136e-05 s^2 + 5.227e-06 s
---------------------------------------------------------
2.3e-06 s^4 + 1.725e-06 s^3 - 4.035e-05 s^2 - 5.018e-06 s
Continuous-time transfer function.
sys는 음의 피드백을 사용하여 결과로 얻은 폐루프 연속시간 전달 함수입니다. feedback은 PID 제어기 모델 C를 전달 함수로 변환한 후에 연속시간 전달 함수 모델 G에 연결합니다. 자세한 내용은 Rules That Determine Model Type 항목을 참조하십시오.
제어기가 음의 피드백 경로에 있는 플랜트
이 예제에서는 각각 플랜트 G와 제어기 C를 기술하는 2개의 전달 함수를 살펴봅니다.
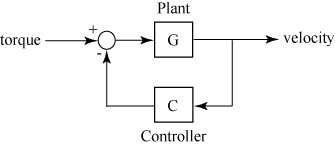
플랜트 및 제어기 전달 함수를 만듭니다.
G = tf([2 5 1],[1 2 3],'inputname',"torque",'outputname',"velocity"); C = tf([5,10],[1,10]);
feedback을 사용하여 G와 C로 음의 피드백 루프를 만듭니다.
sys = feedback(G,C,-1)
sys = From input "torque" to output "velocity": 2 s^3 + 25 s^2 + 51 s + 10 --------------------------- 11 s^3 + 57 s^2 + 78 s + 40 Continuous-time transfer function.
sys는 입력이 torque이고 출력이 velocity인 음의 피드백을 사용하여 결과로 얻은 폐루프 전달 함수입니다.
플랜트와 제어기로 이루어진 양의 피드백 루프
이 예제에서는 각각 플랜트 G와 제어기 C를 기술하는 2개의 전달 함수를 살펴봅니다.
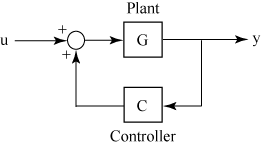
플랜트 및 제어기 전달 함수를 만듭니다.
G = tf([2 5 1],[1 2 3],'inputname',"torque",'outputname',"velocity"); C = tf([5,10],[1,10]);
feedback 함수에 G와 C를 사용하여 양의 피드백 루프를 만듭니다.
sys = feedback(G,C,+1)
sys = From input "torque" to output "velocity": -2 s^3 - 25 s^2 - 51 s - 10 --------------------------- 9 s^3 + 33 s^2 + 32 s - 20 Continuous-time transfer function.
sys는 입력이 torque이고 출력이 velocity인 양의 피드백으로 얻은 폐루프 전달 함수입니다.
MIMO 시스템으로 구성된 음의 피드백 루프
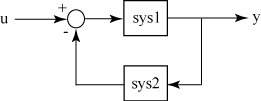
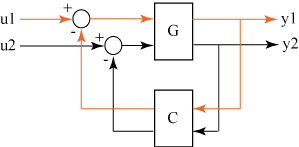
아래 그림과 같이 입력이 2개이고 출력이 2개인 2개의 MIMO 전달 함수를 음의 피드백 루프로 연결한다고 가정하겠습니다.
이 예제에서는 rss를 사용하여 2개의 무작위 연속 상태공간 모델을 만듭니다.
G = rss(4,2,2); C = rss(2,2,2); size(G)
State-space model with 2 outputs, 2 inputs, and 4 states.
size(C)
State-space model with 2 outputs, 2 inputs, and 2 states.
feedback을 사용하여 2개의 상태공간 모델을 위 그림에 따라 음의 피드백 루프로 연결합니다.
sys = feedback(G,C,-1); size(sys)
State-space model with 2 outputs, 2 inputs, and 6 states.
결과로 생성되는 상태공간 모델 sys는 상태가 6개인 2-입력 2-출력 모델입니다. 음의 피드백 루프는 다음과 같이 완성됩니다.
G의 첫 번째 출력이C의 첫 번째 입력에 연결됨G의 두 번째 출력이C의 두 번째 입력에 연결됨
I/O 이름 기반의 피드백 루프
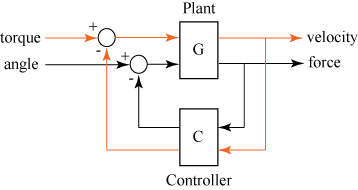
mimoPlantAndController.mat는 다음과 같이 연결할 2-입력 2-출력 전달 함수 플랜트 모델 G와 2-입력 2-출력 전달 함수 제어기 모델 C를 포함합니다.
먼저 플랜트 및 제어기 모델을 작업 공간으로 불러옵니다.
load('mimoPlantAndController.mat','G','C'); size(G)
Transfer function with 2 outputs and 2 inputs.
size(C)
Transfer function with 2 outputs and 2 inputs.
기본적으로 feedback은 G의 첫 번째 출력을 C의 첫 번째 입력에 연결하고 G의 두 번째 출력을 C의 두 번째 입력에 연결합니다. 그림과 같이 플랜트와 제어기를 올바르게 연결하려면 두 시스템의 각 I/O에 이름을 지정하십시오.
G.InputName
ans = 2x1 cell
{'torque'}
{'angle' }
G.OutputName
ans = 2x1 cell
{'velocity'}
{'force' }
C.InputName
ans = 2x1 cell
{'force' }
{'velocity'}
C.OutputName
ans = 2x1 cell
{'angle' }
{'torque'}
그런 다음 feedback 명령을 'name' 플래그와 함께 사용하여 I/O 이름에 따라 연결을 만듭니다.
sys = feedback(G,C,'name');결과로 생성되는 폐루프 음의 피드백 전달 함수 sys에서 요구 사항의 순서대로 피드백이 연결됩니다.
피드백 루프의 입력 및 출력 연결 지정하기
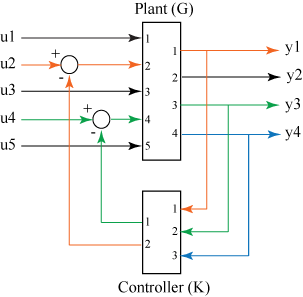
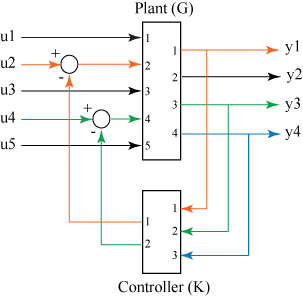
입력 5개와 출력 4개를 가진 상태공간 플랜트 G와 입력 3개와 출력 2개를 가진 상태공간 피드백 제어기 K가 있다고 가정하겠습니다. 플랜트 G의 출력 1, 3, 4는 제어기 K의 입력에 연결되어야 하고, 제어기 출력은 플랜트의 입력 2와 4에 연결되어야 합니다.
이 예제에서는 G와 K 양쪽에 대해 rss를 사용하여 무작위 연속시간 상태공간 모델을 생성합니다.
G = rss(3,4,5); K = rss(3,2,3);
피드백 루프에서 연결될 입력과 출력을 바탕으로 feedout 벡터와 feedin 벡터를 정의합니다.
feedin = [2 4]; feedout = [1 3 4]; sys = feedback(G,K,feedin,feedout,-1); size(sys)
State-space model with 4 outputs, 5 inputs, and 6 states.
sys는 G와 K의 지정된 입력과 출력을 연결하여 결과로 얻은 폐루프 상태공간 모델입니다.
입력 인수
sys1,sys2 — 피드백 루프에서 연결할 시스템
동적 시스템 모델
피드백 루프에서 연결할 시스템으로, 동적 시스템 모델로 지정됩니다. 사용 가능한 동적 시스템에는 다음이 포함됩니다.
자세한 내용은 동적 시스템 모델을 참조하십시오.
sys1과 sys2가 서로 다른 모델 유형인 경우 feedback은 우선 순위 규칙을 사용하여 결과 모델 sys를 결정합니다. 예를 들어, 피드백 루프에서 상태공간 모델과 전달 함수가 연결된 경우, 결과로 생성되는 시스템은 우선 순위 규칙에 따라 상태공간 모델입니다. 자세한 내용은 Rules That Determine Model Type 항목을 참조하십시오.
feedin — 사용할 입력의 서브셋
벡터
사용할 입력의 서브셋으로, 벡터로 지정됩니다.
그림을 보면 feedin은 MIMO 플랜트 P의 입력 벡터의 인덱스를 포함하며 입력 u의 어떤 서브셋이 피드백 루프에 사용되는지 지정합니다. 결과로 생성되는 모델 sys는 G와 입력이 동일하며 순서도 그대로 유지됩니다.
예제는 피드백 루프의 입력 및 출력 연결 지정하기 항목을 참조하십시오.
feedout — 사용할 출력의 서브셋
벡터
사용할 출력의 서브셋으로, 벡터로 지정됩니다.
feedout은 MIMO 플랜트 G의 어떤 출력을 피드백에 사용할지 지정합니다. 결과로 생성되는 모델 sys는 G와 출력이 동일하며 순서도 그대로 유지됩니다.
예제는 피드백 루프의 입력 및 출력 연결 지정하기 항목을 참조하십시오.
sign — 피드백 유형
-1 (디폴트 값) | +1
피드백 유형으로, 음의 피드백의 경우 -1로 지정되고 양의 피드백의 경우 +1로 지정됩니다. feedback은 기본적으로 음의 피드백을 가정합니다.
출력 인수
제한 사항
피드백 연결에는 대수 루프가 없어야 합니다. 예를 들어, D1과 D2가
sys1과sys2의 피드스루 행렬인 경우 이 조건은 다음과 동일합니다.음의 피드백을 사용하는 경우 I + D1D2가 정칙
양의 피드백을 사용하는 경우 I − D1D2가 정칙
버전 내역
R2006a 이전에 개발됨
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)