이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
d2c
이산시간 모델을 연속시간 모델로 변환
설명
예제
이산시간 전달 함수를 연속시간으로 변환하기
다음과 같은 이산시간 전달 함수를 만듭니다.
H = tf([1 -1],[1 1 0.3],0.1);
모델의 샘플 시간 입니다.
연속시간 영차 유지 동급 모델을 파생시킵니다.
Hc = d2c(H)
Hc = 121.7 s + 3.668e-12 --------------------- s^2 + 12.04 s + 776.7 Continuous-time transfer function.
디폴트 영차 유지 방법과 샘플 시간 0.1초를 사용해 결과 모델 Hc를 이산화하여 원래 이산 모델 H를 반환합니다.
c2d(Hc,0.1)
ans =
z - 1
-------------
z^2 + z + 0.3
Sample time: 0.1 seconds
Discrete-time transfer function.
Tustin 근사법을 사용하여 H를 연속시간 모델로 변환합니다.
Hc2 = d2c(H,'tustin');결과 모델 Hc2를 이산화하여 원래 이산시간 모델 H를 다시 얻습니다.
c2d(Hc2,0.1,'tustin');식별된 이산시간 전달 함수를 연속시간으로 변환하기
이산시간 전달 함수 모델을 추정하고 이를 연속시간 모델로 변환합니다.
load iddata1 sys1d = tfest(z1,2,'Ts',0.1); sys1c = d2c(sys1d,'zoh');
연속시간 전달 함수 모델을 추정합니다.
sys2c = tfest(z1,2);
sys1c의 응답과 직접 추정한 연속시간 모델 sys2c를 비교합니다.
compare(z1,sys1c,sys2c)
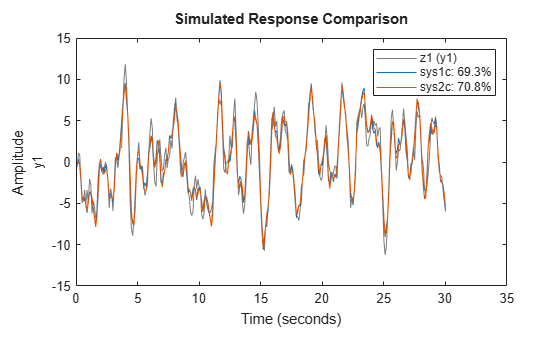
두 시스템은 거의 동일합니다.
연속시간 모델로 변환한 후에 공분산 정보 다시 생성하기
식별된 이산시간 전달 함수 모델을 연속시간으로 변환합니다.
load iddata1 sysd = tfest(z1,2,'Ts',0.1); sysc = d2c(sysd,'zoh');
sys1c에는 공분산 정보가 없습니다. d2c 연산을 수행하면 식별된 모델의 공분산 데이터가 손실됩니다.
동일한 추정 명령과 추정 데이터로 영 반복 업데이트를 사용하여 공분산 정보를 다시 생성합니다.
opt = tfestOptions; opt.SearchOptions.MaxIterations = 0; sys1c = tfest(z1,sysc,opt);
주파수 응답 불확실성에 미치는 영향을 분석합니다.
h = bodeplot(sysd,sys1c); showConfidence(h,3)
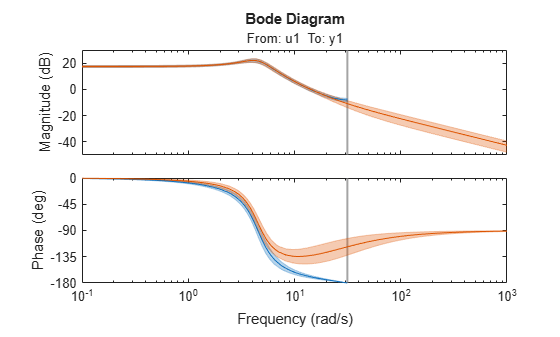
sys1c와 sysd의 불확실성은 나이퀴스트 주파수까지 유사합니다. 그러나 추정 데이터가 정보를 제공하지 않는 주파수 범위에서는 sys1c가 큰 불확실성을 보입니다.
추정 데이터가 없는 경우, 모델 유형 변환 연산 간에 가우스 근사 식 기반 공분산 변환인 translatecov 명령을 사용하십시오.
입력 인수
출력 인수
참고 문헌
[1] Franklin, G.F., Powell,D.J., and Workman, M.L., Digital Control of Dynamic Systems (3rd Edition), Prentice Hall, 1997.
[2] Kollár, I., G.F. Franklin, and R. Pintelon, "On the Equivalence of z-domain and s-domain Models in System Identification," Proceedings of the IEEE® Instrumentation and Measurement Technology Conference, Brussels, Belgium, June, 1996, Vol. 1, pp. 14-19.
버전 내역
R2006a 이전에 개발됨
참고 항목
d2cOptions | c2d | translatecov (System Identification Toolbox) | logm | 모델 레이트 변환
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)