Simulink Control Design을 통해 Simulink에서 모델링한 제어 시스템을 설계하고 분석할 수 있습니다. PID 제어기를 비롯한 임의의 SISO 및 MIMO 제어 아키텍처를 자동으로 조정할 수 있습니다. PID 자동 조정을 임베디드 소프트웨어에 배포하여 PID 이득을 실시간으로 자동 계산할 수 있습니다. 또한 변화하는 플랜트 및 외란 동역학에 제어기가 적응해야 하는 응용 분야를 위해 능동 외란 제거 제어, 극값 탐색 제어 및 모델 참조 적응형 제어 알고리즘을 구현할 수도 있습니다.
다양한 동작 조건에서 Simulink 모델의 동작점을 찾고 정확한 선형화를 계산할 수 있습니다. Simulink Control Design은 모델을 수정하지 않고도 시뮬레이션 기반의 주파수 응답을 계산할 수 있는 툴을 제공합니다.

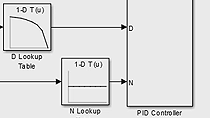
PID 제어기 조정
PID 조정기 앱을 사용하여 Simulink 모델의 PID 제어기를 자동으로 조정할 수 있습니다. Closed-Loop PID Autotuner 블록에 대해 C 코드를 생성하여 임베디드 하드웨어에 PID 조정 알고리즘을 배포하고 실행할 수 있습니다.
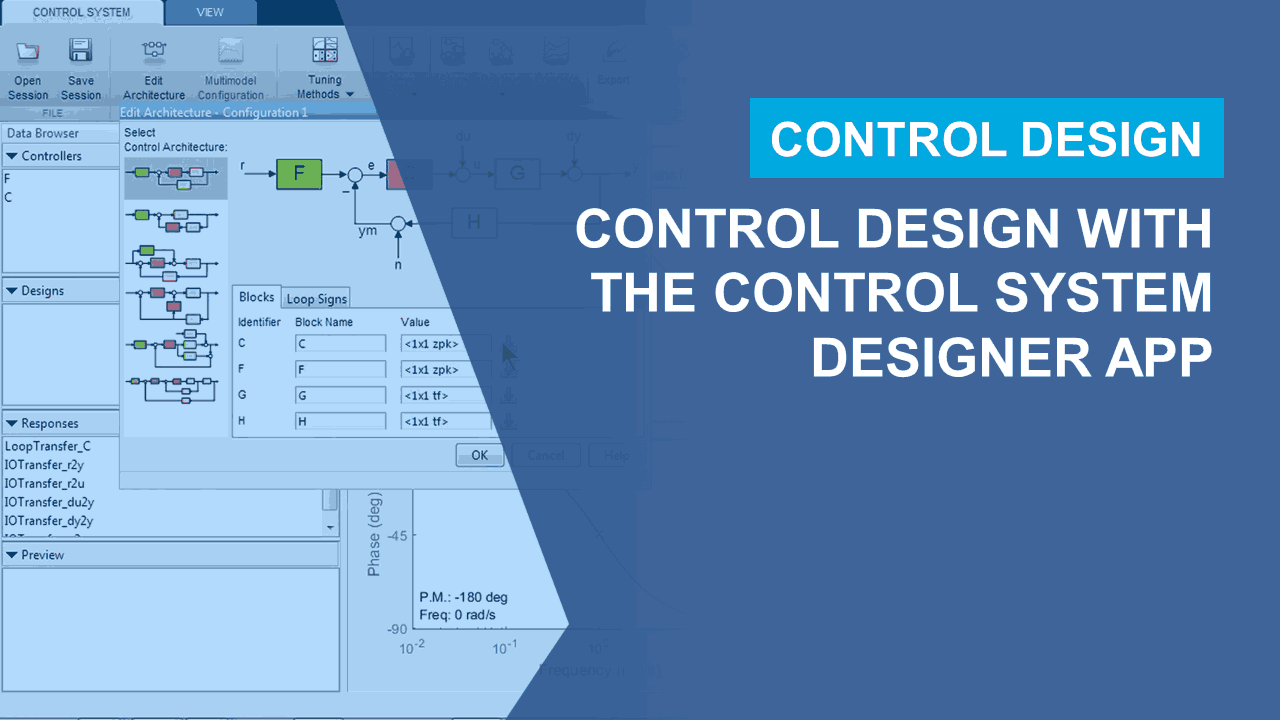
고전 제어 설계
제어 시스템 디자이너 앱에서 자동 조정 그래픽 툴을 사용하여 Simulink에서 SISO 제어 루프를 조정할 수 있습니다.
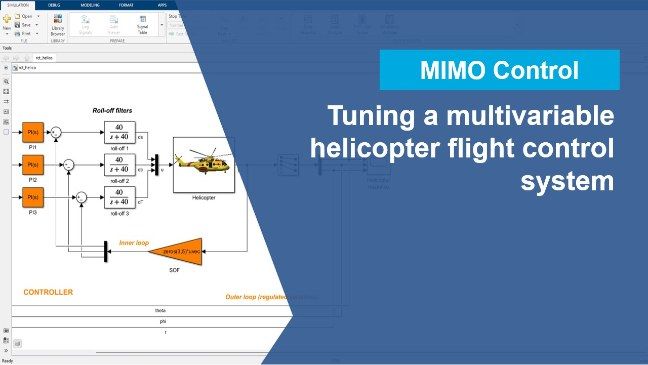
다중 루프 다중 목적 조정
제어 시스템 조정기 앱을 사용해서 Simulink에서 모델링된 임의의 SISO 및 MIMO 분산 제어 구조를 자동으로 조정하여 시간 및 주파수 영역 설계 요구사항을 충족할 수 있습니다.
이득 스케줄링
비선형 또는 시변 플랜트에 대해 이득 스케줄링 제어기를 자동으로 조정하여 시스템의 작동 포락선 전체에 걸쳐 성능 요구사항을 충족할 수 있습니다.



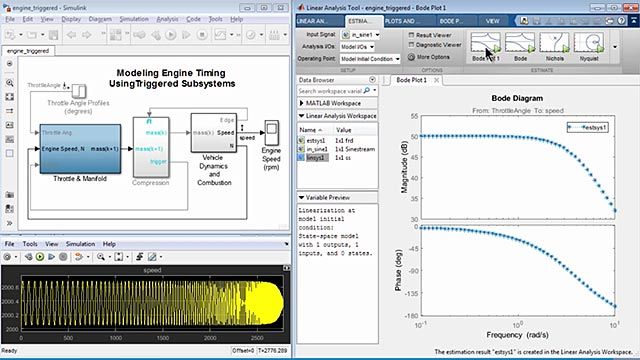
선형화
모델 선형기 앱을 사용하여 연속, 이산, 멀티레이트 Simulink 모델을 선형화할 수 있습니다. LinearizationAdvisor 객체를 사용하여 흔히 발생하는 선형화 관련 문제를 식별하고 해결할 수 있습니다.
제품 관련 자료:

“MathWorks 툴이 고객이 요구하는 혁신적인 기술적 기능을 만들 수 있는 통합 환경을 제공하여 우리는 설계 공정을 간소화할 수 있었습니다.”
Laurence Lane, Haldex
추가 참고 자료



또한 다음 목록에서 웹사이트를 선택하실 수도 있습니다.
미주
- América Latina (Español)
- Canada (English)
- United States (English)
유럽
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
아시아 태평양
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)